

Point cloud registration method with a low overlapping rate
An overlapping rate and point cloud technology, applied in the field of 3D reconstruction, can solve problems such as the inability to guarantee convergence to the global best result, and achieve the effect of reducing the number and improving the registration accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
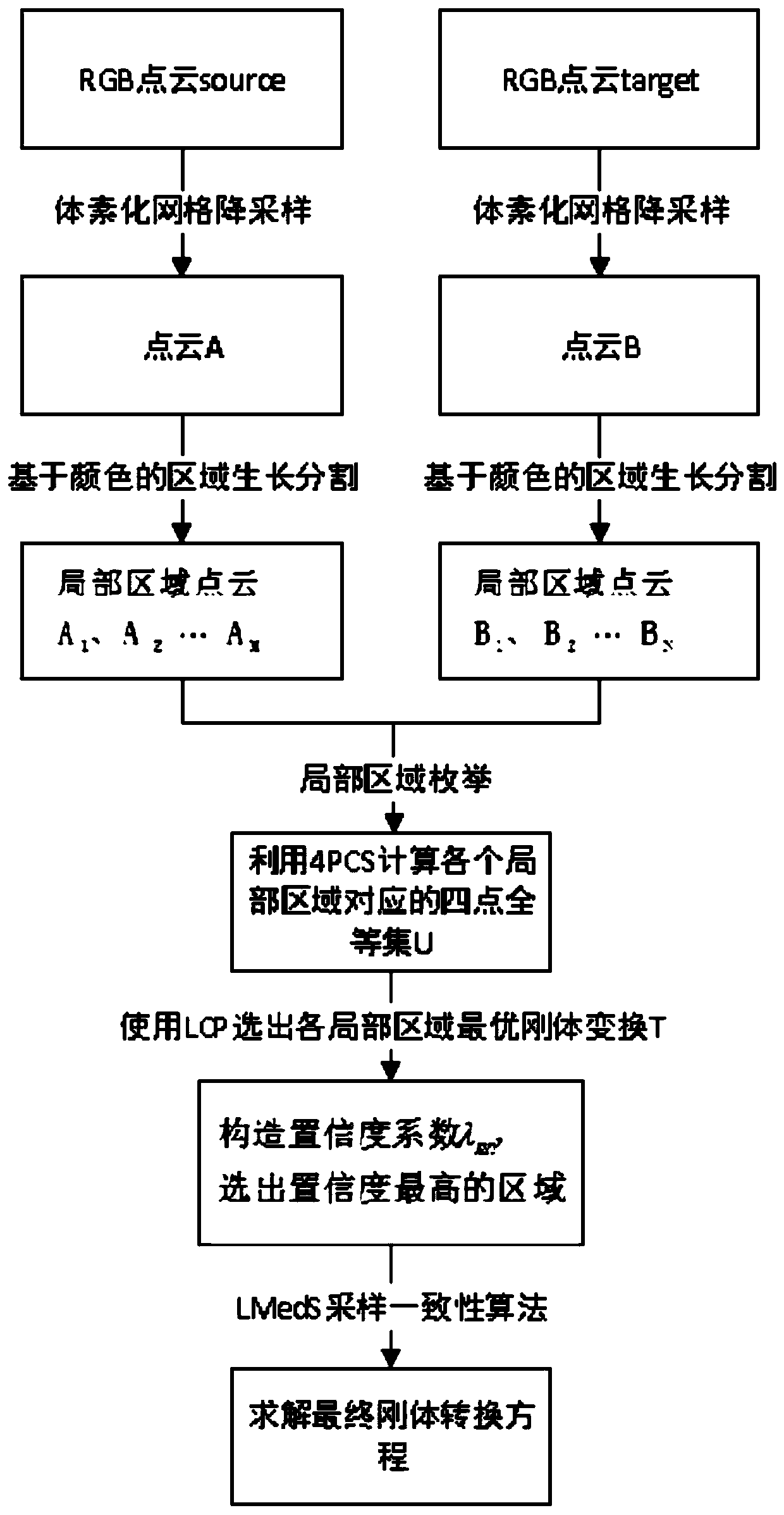
[0052] Such as figure 1 As shown, a low overlap rate 3D point cloud registration method includes the following steps:
[0053] Step 1: Obtain source point cloud and target point cloud;
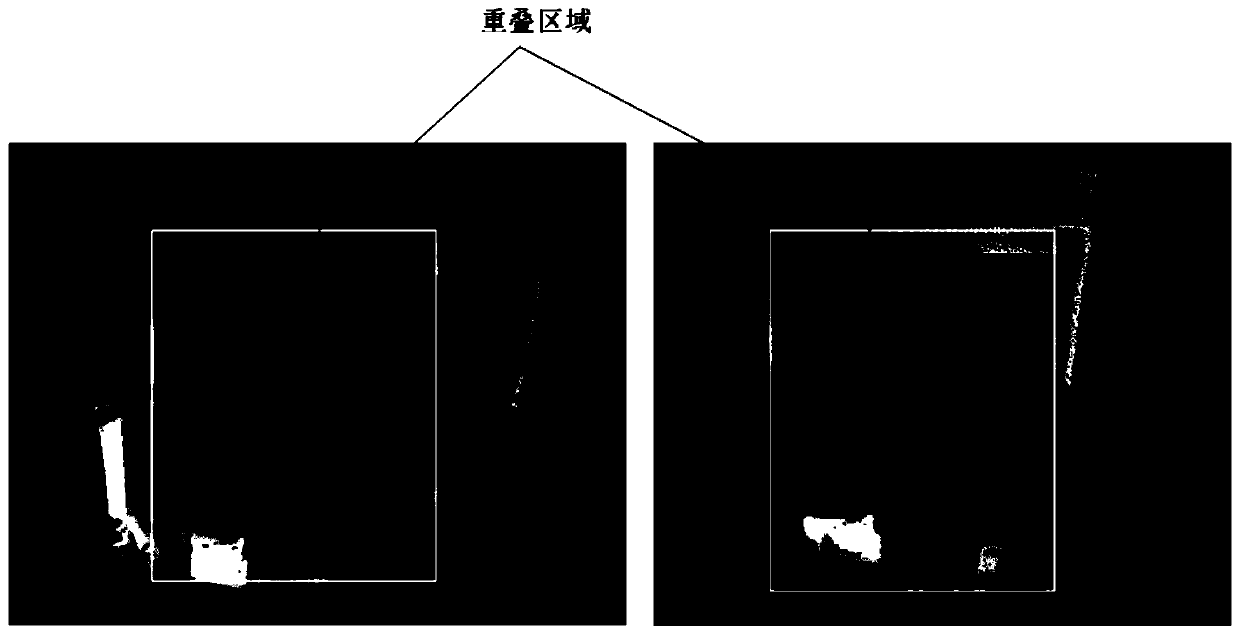
[0054] Use the Kinect V2 depth camera to measure the indoor scene to be tested and keep the objects in the scene still; collect RGB point cloud data for the same object to be measured from two different perspectives V1 and V2 to ensure that there is overlap between the two frames of point clouds area; the point cloud collected by viewing angle V1 is used as the source point cloud source, and the point cloud collected by viewing angle V2 is used as the target point cloud target; the RGB point cloud not only contains structural information, but also contains color information of the point cloud; the collection effect is as follows figure 2 Shown; The area sele...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More