Impact-driven capsule robot mechanism for non-invasive diagnosis and examination of small intestine
A capsule robot, driven technology, applied in the direction of diagnosis, application, medical science, etc., can solve the problems of low diagnosis efficiency, difficult use, human discomfort, etc., and achieve the effect of ingenious design, reasonable structure, and low control difficulty
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
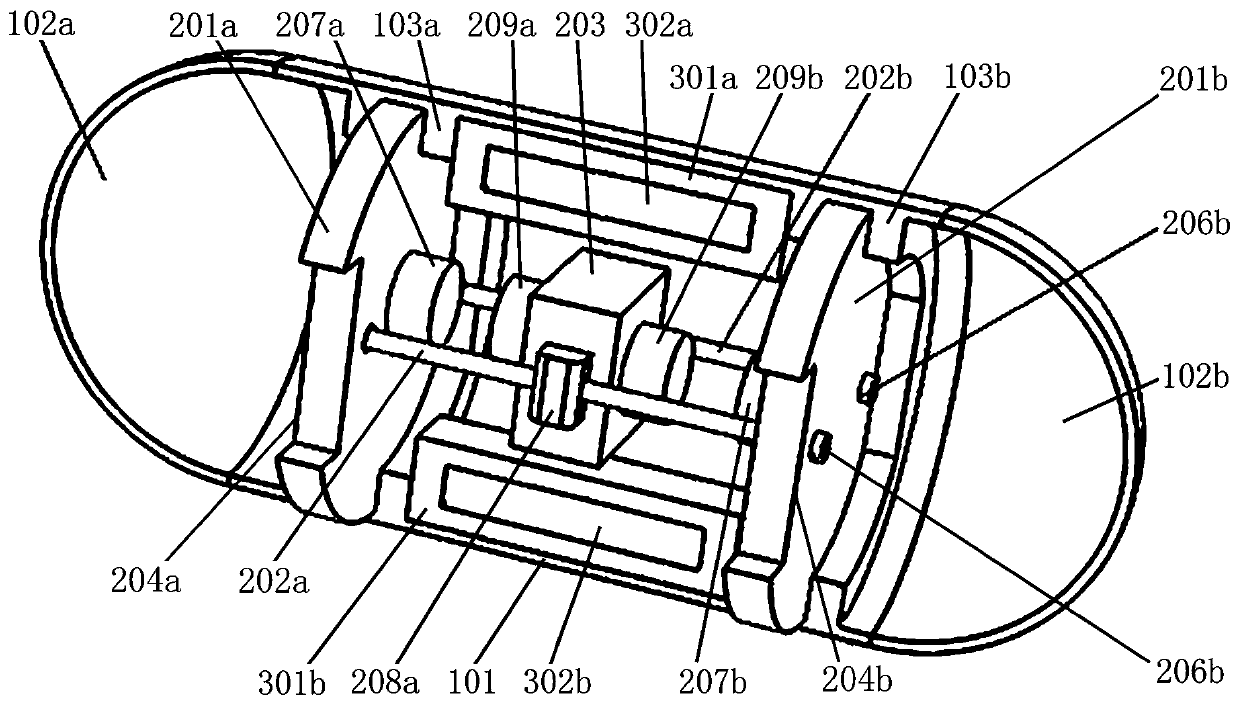
[0034] An impact-driven capsule robot mechanism for non-invasive diagnosis of the small intestine, including a capsule-shaped shell, an impact-driven module, and a driving reinforcement module;
[0035] The capsule-shaped housing comprises a circular tubular housing 101, a front hemispherical housing 102a, and a rear hemispherical housing 102b;
[0036] The inner side of the circular tube-shaped housing 101 is extended with a front runway-shaped limiting convex ring 103a; the inner side of the front raceway-shaped limiting convex ring 103a is provided with a front arc section and an inner side lower arc section respectively. shape limit groove; the inner surface rear portion of the circular tube-shaped housing 101 is extended with a rear track-shaped limit protrusion ring 103b; Each section is provided with a rear arc-shaped limit groove; the front hemispherical shell 102a is sealed and buckled to the front nozzle of the circular tubular shell 101; the rear hemispherical shell...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com