

A point laser line calibration method and system for robot assembly
A calibration method and robot technology, applied in the field of robot vision, can solve the problems of low accuracy and high cost of calibrating assembly components, and achieve the effects of improving accuracy, reducing calibration cost and high efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
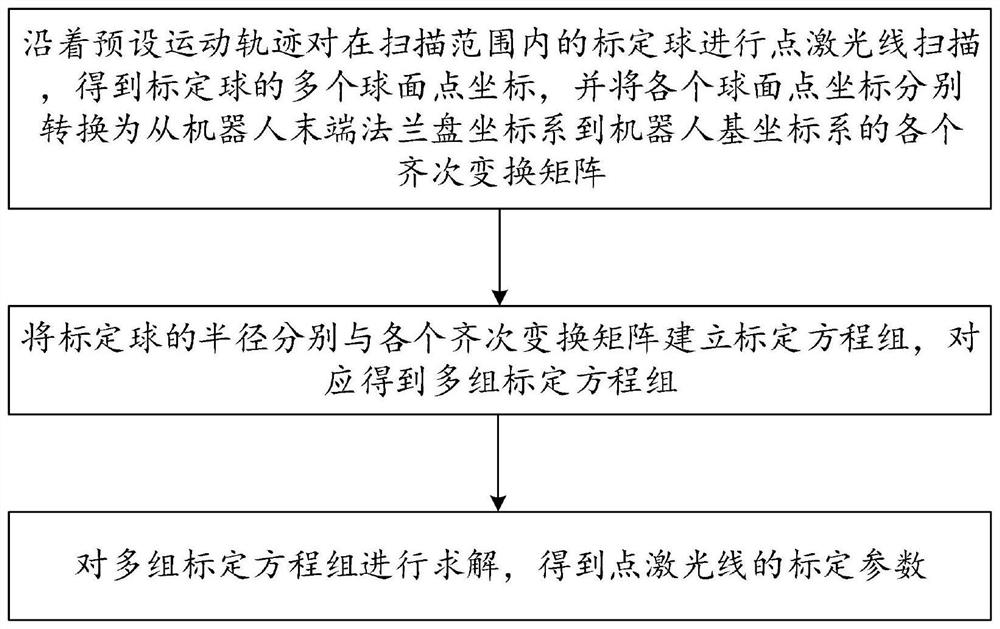
[0022] like figure 1 As shown, a schematic flow chart of a point laser line calibration method for robot assembly according to an embodiment of the present invention, the method includes:
[0023] Carry out point laser line scanning on the calibration ball within the scanning range along the preset motion trajectory to obtain multiple spherical point coordinates of the calibration ball, and convert the coordinates of each spherical point into the coordinate system from the end flange of the robot to the robot base. Individual homogeneous transformation matrices for the coordinate system.
[0024] The radius of the calibration sphere and each homogeneous transformation matrix are used to establish a calibration equation group, correspondingly to obtain multiple sets of calibration equations, and solve the multiple sets of calibration equations to obtain the calibration parameters of the point laser line.
[0025] Preferably, each calibration equation group includes a coordinat...
Embodiment 2
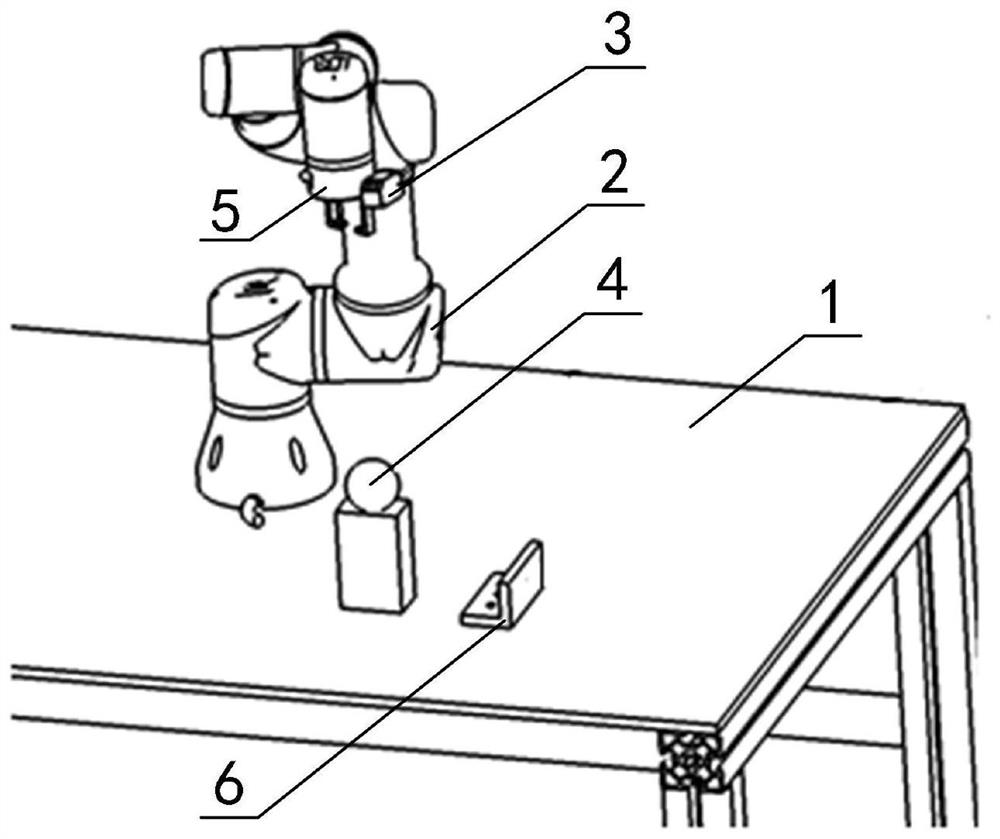
[0048] like figure 2 As shown, a schematic structural diagram of a point laser line marking system for robot assembly according to an embodiment of the present invention, figure 2 Among them, a robot 2 , a calibration ball 4 and an assembly 6 are fixed on the workbench 1 , the flange 5 at the end of the robot is equipped with a point laser sensor 3 , and the calibration ball 4 is set within the scanning range of the point laser sensor 3 .
[0049] The point laser sensor 3 is used to perform point laser line scanning on the calibration ball 4 within the scanning range according to the preset motion track when the robot 2 drives the point laser sensor 3 to move according to the preset motion track, so as to obtain multiple images of the calibration ball 4 Spherical point coordinates.
[0050] The robot 2 is used to convert the coordinates of each spherical point into homogeneous transformation matrices from the robot end flange coordinate system to the robot base coordinate s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More