

Parasitic mechanism type space-controllable excavating mechanism
A mechanism-based, space-based technology, applied to mechanically driven excavators/dredgers, etc., can solve problems such as high manufacturing precision, insufficient response, and failure to use normally, so as to achieve stable motion, increase motion reliability, and improve reliability Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The technical solution of the present invention will be further described below through the drawings and embodiments.
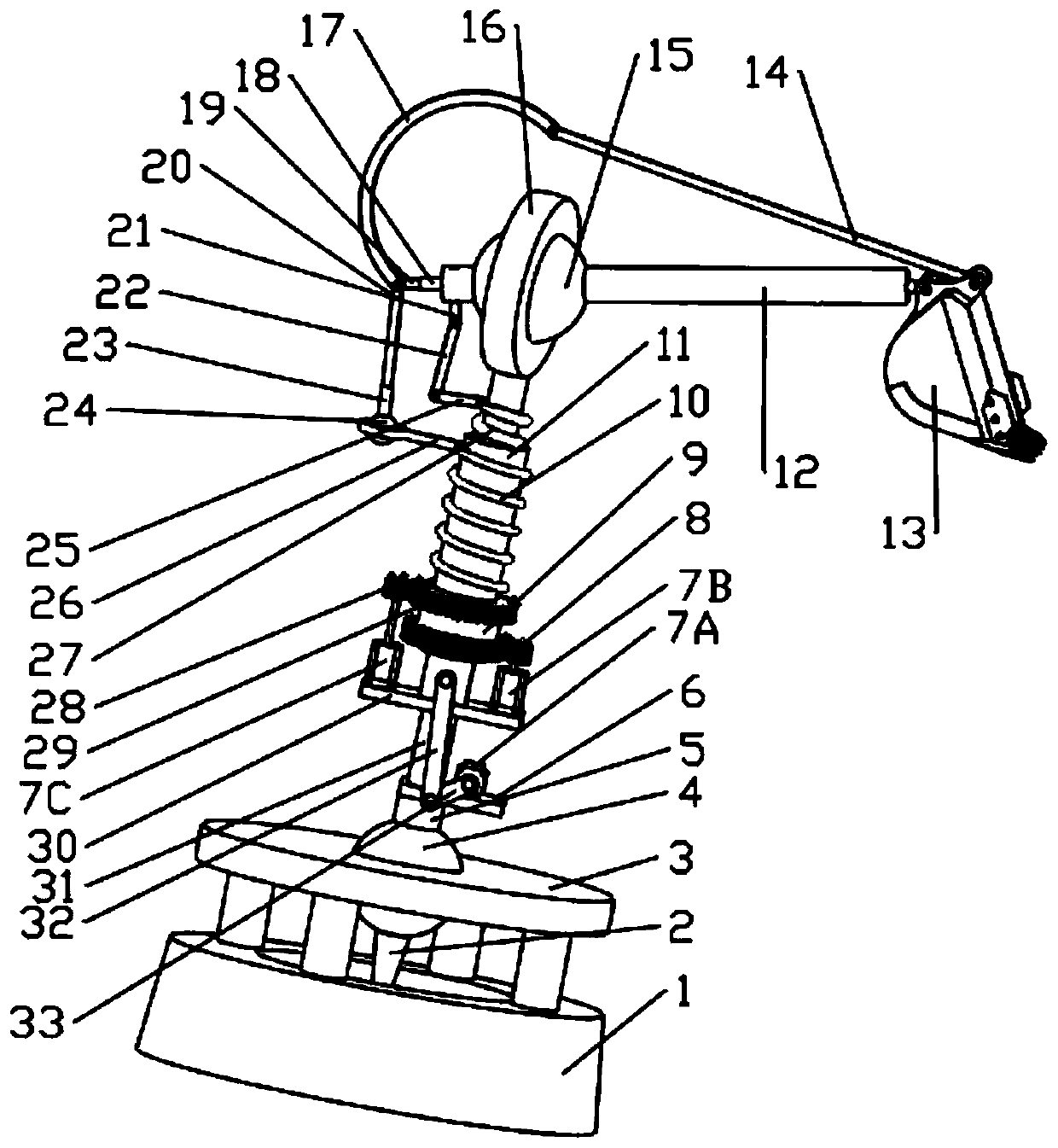
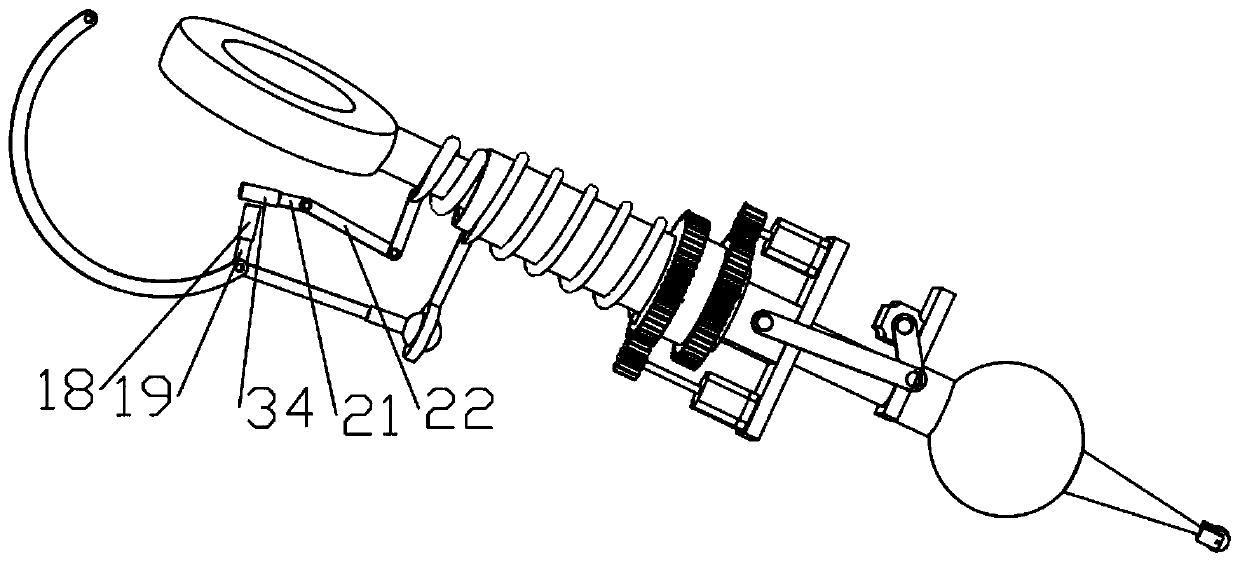
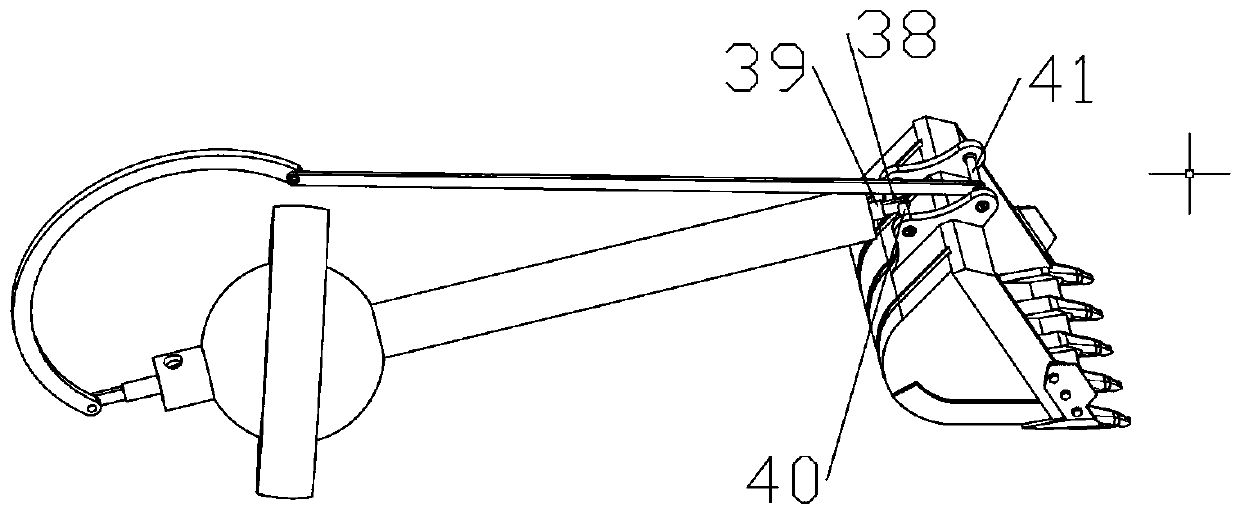
[0025] The parasitic mechanism type space controllable excavating mechanism of the present invention includes a three-dimensional rotating arm mechanism, a three-dimensional arm mechanism, a parasitic mechanism, a one-dimensional bucket mechanism and a fuselage. The specific structure and connection relationship are:
[0026] The three-dimensional rotating arm mechanism includes a power roller 35, a roller cylindrical pin 36, a roller support frame 37, a tapered connecting rod 2, a rotating arm sphere 4, a first ball ring sleeve 3, a base sleeve 5, and a first motor frame plate 6. , Rotate the arm ball rod 31, the power roller 35 is mounted on the roller cylindrical pin 36, the roller cylindrical pin 36 is mounted on the roller support frame 37, the roller support frame 37 is fixedly connected to the tapered connecting rod 2, and the tapered connecting rod 2...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More