

Shared factor fuzzy inference device applied to hexapod robot
A hexapod robot, robot technology, applied in the direction of instrument, adaptive control, general control system, etc., can solve the problems of speed loss, motion out of control, robot instability, etc., to reduce speed loss, reduce work pressure, and improve transparency. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0019] Embodiments of the present invention will be further described in detail below in conjunction with the accompanying drawings and examples.
[0020] One embodiment of the present invention: a kind of shared factor fuzzy reasoner applied to hexapod robot, its content comprises the following steps:
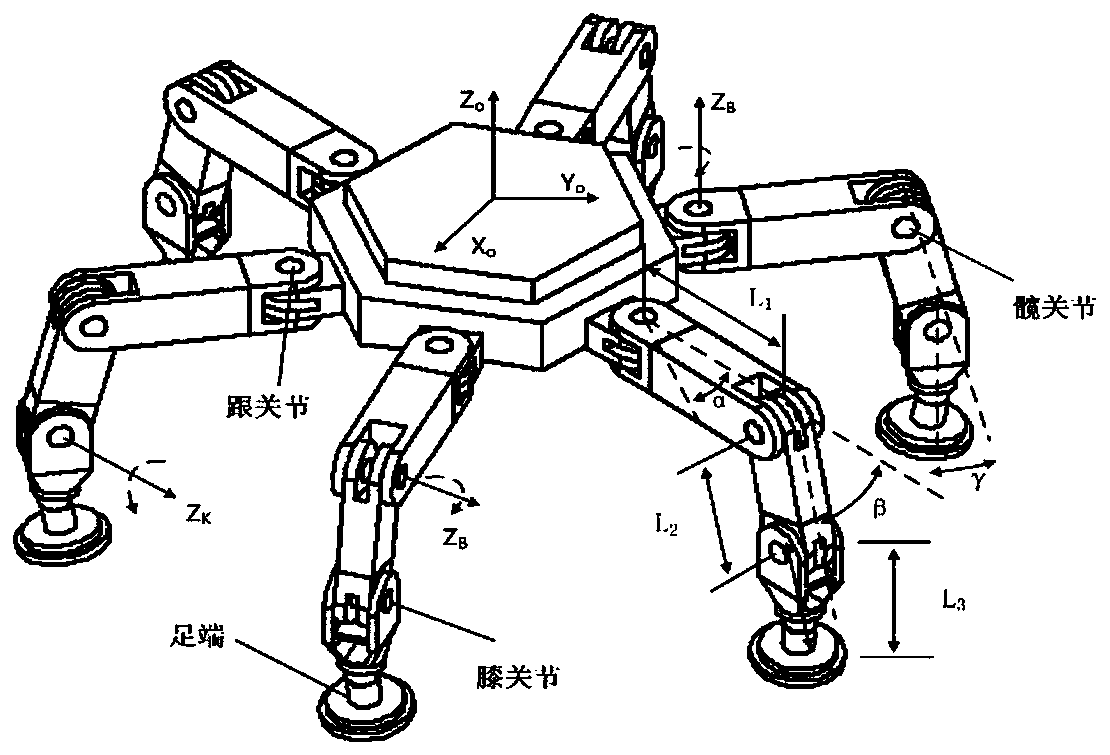
[0021] Step 1: Carry out dynamic modeling for the master-end robot, and perform kinematic modeling for the slave-end robot; the specific implementation method is as follows:
[0022] The dynamic equation of the master robot is as follows:
[0023]
[0024] Among them, the subscript 1 represents the main-end robot of the velocity layer, 2 represents the main-end robot of the pose layer, τ m is the control law of the host robot, τ h is the force exerted by the operator on the master robot, M m is the mass of the end robot, B m is the damping coefficient of the host robot, q m is the position vector of the client robot;
[0025] Feature 1: M m is a positive definite mat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More