Map error information detection method, device and equipment, vehicle and storage medium
A technology of error information and detection method, which is applied in the direction of measuring device, geographic information database, vehicle position/route/height control, etc., can solve the problem of low detection efficiency of map error information, improve timeliness and efficiency, and improve driving safety sexual effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
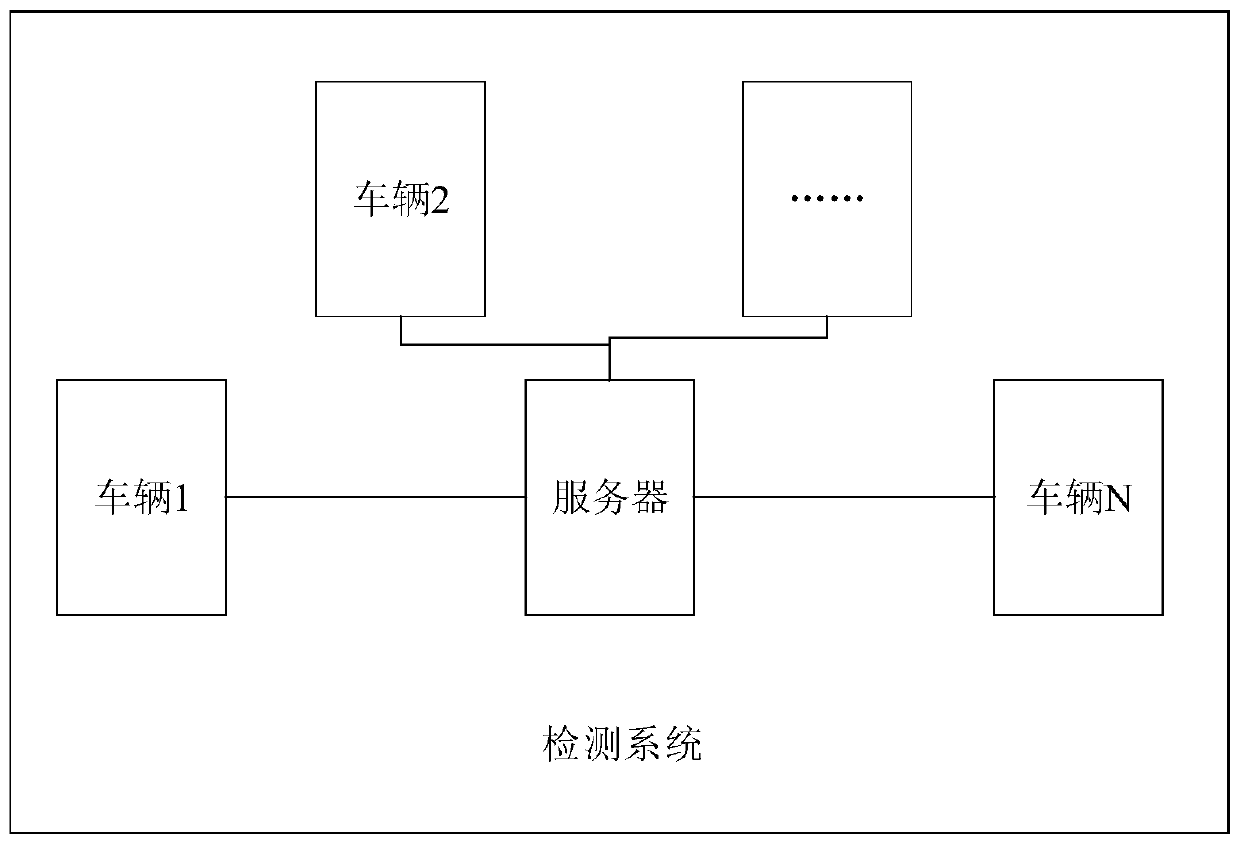
[0030] This embodiment provides a method for detecting map error information, which is used to detect map errors in real time. The execution subject of this embodiment is the map error information detection device, and the device can be set in a computer device, and the computer device is set on a vehicle.
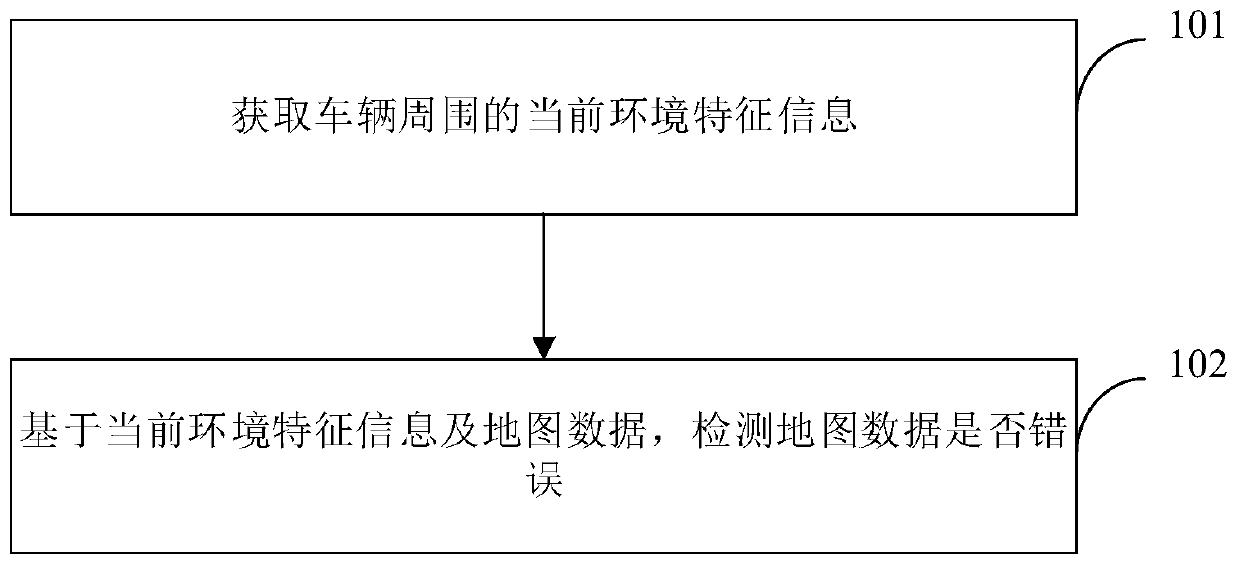
[0031] Such as figure 2 As shown, it is a schematic flow chart of the method for detecting error information of the map provided in this embodiment, and the method includes:
[0032] Step 101, acquiring current environment feature information around the vehicle.
[0033] Specifically, the vehicle is equipped with sensors such as cameras (such as binocular cameras, monocular cameras, etc.), radars, lidars, and millimeter-wave radars. During the actual driving process of the vehicle, the current environmental feature information around the vehicle can be obtained in real time.
[0034] The current environment feature information may include lane line feature information, ...
Embodiment 2
[0050] This embodiment provides a further supplementary description of the method provided in the first embodiment.
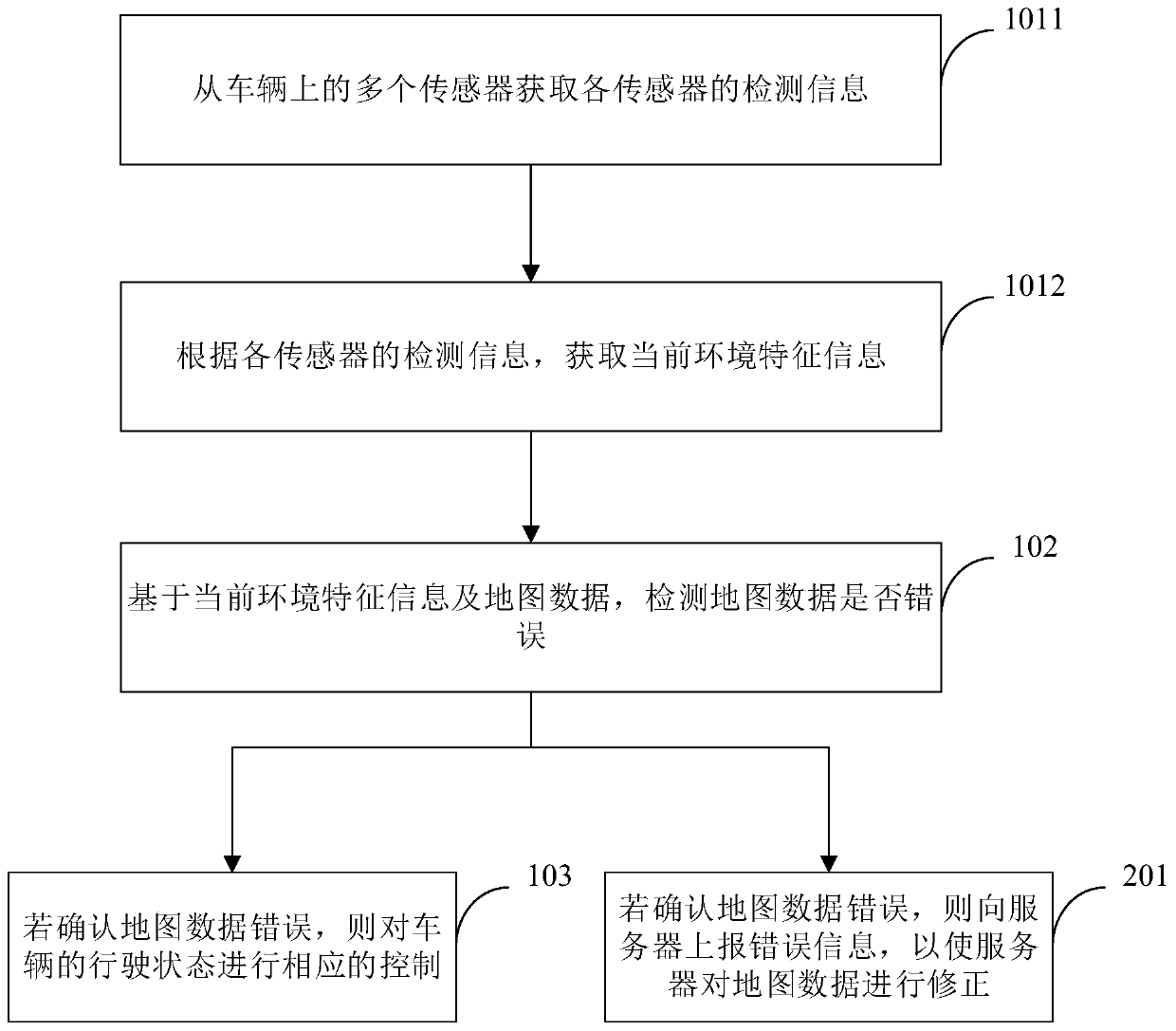
[0051] Such as image 3 As shown, it is a schematic flow chart of the method for detecting error information of a map provided in this embodiment.
[0052] As an implementable manner, on the basis of the first embodiment above, optionally, step 101 specifically includes:
[0053] Step 1011, acquiring detection information of each sensor from multiple sensors on the vehicle.
[0054] Step 1012, according to the detection information of each sensor, obtain the current environment feature information.
[0055] Specifically, the sensor may include sensors such as a camera (such as a binocular camera, a monocular camera, etc.), a radar, a lidar, and a millimeter-wave radar.
[0056] Exemplarily, each sensor collects environmental information in different directions around the vehicle, and obtains partial or complete environmental feature information around the vehi...
Embodiment 3
[0082] This embodiment provides a device for detecting map error information, which is used to implement the method in the first embodiment above.
[0083] Such as Figure 5 As shown in , it is a schematic structural diagram of the map error information detection device provided in this embodiment. The map error information detection device 30 includes an acquisition module 31 and a processing module 32 .
[0084] Wherein, the acquiring module 31 is used to acquire the current environment feature information around the vehicle; the processing module 32 is used to detect whether the map data is wrong based on the current environment feature information and the map data.
[0085] Regarding the apparatus in this embodiment, the specific manner in which each module executes operations has been described in detail in the embodiment of the method, and will not be described in detail here.
[0086] According to the map error information detection device provided in this embodiment,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



