

A six-degree-of-freedom controllable parasitic mechanism welding robot
A welding robot and mechanism-based technology, applied in welding equipment, auxiliary welding equipment, program-controlled manipulators, etc., can solve problems such as unreasonable power distribution, and achieve the effects of reducing the load of the mechanism, reducing energy consumption, and reducing additional loads
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
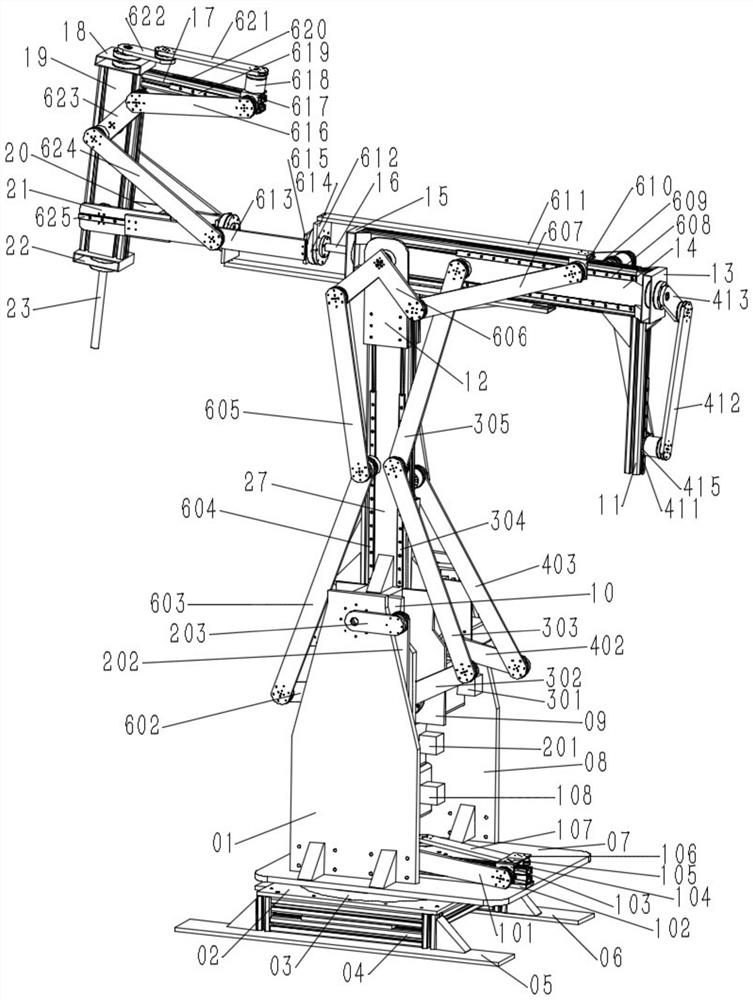
[0038] Such as figure 1 As shown, a six-degree-of-freedom controllable parasitic mechanism type welding robot is composed of a host mechanism and a parasitic branch chain. The host mechanism is composed of a base bracket 04, a large arm 27, a middle arm 14, and a small arm 19. The parasitic mechanism It consists of six mutually independent branch chains. The specific structure and connection method are:
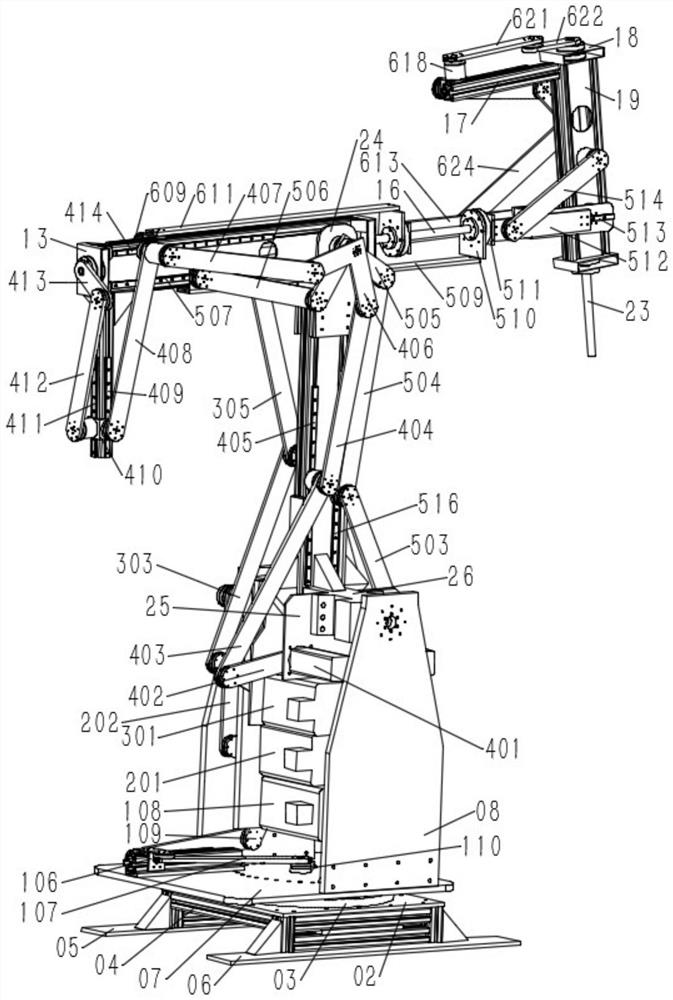
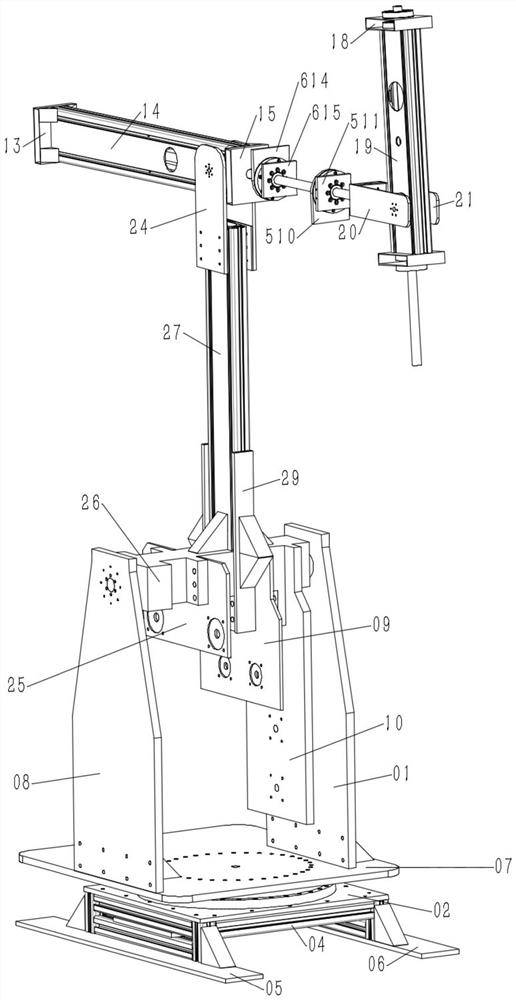
[0039] Such as figure 1 , image 3 As shown, the structure and connection method of the host mechanism are as follows: the upper part of the base bracket 04 is fixedly connected with the bearing support plate 02, the left side of the lower part of the base bracket 04 is fixedly connected with the left foot board 05, and the right side of the lower part of the base bracket 04 is fixedly connected with the right foot board 06. The purpose of connecting the two foot plates is to make the contact area between the base and the ground larger and the working process more stable; ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More