

Head movement device and robot
A technology of an active device and an active mechanism, applied in the field of robots, can solve the problems of inconvenient disassembly process, inconvenient installation and disassembly process, inability to simulate human head movement and installation, etc., to achieve convenient installation and maintenance and disassembly, efficient simulation effect, Rotating flexible effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
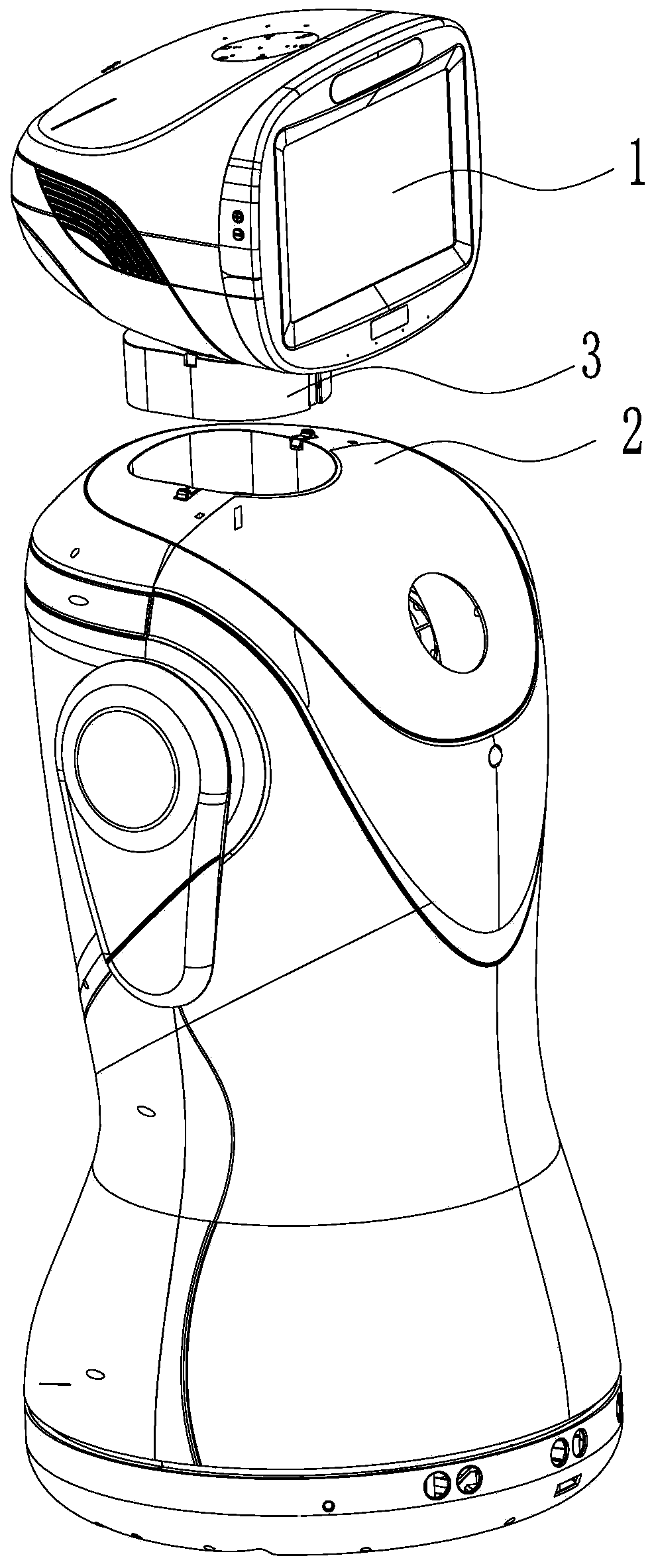
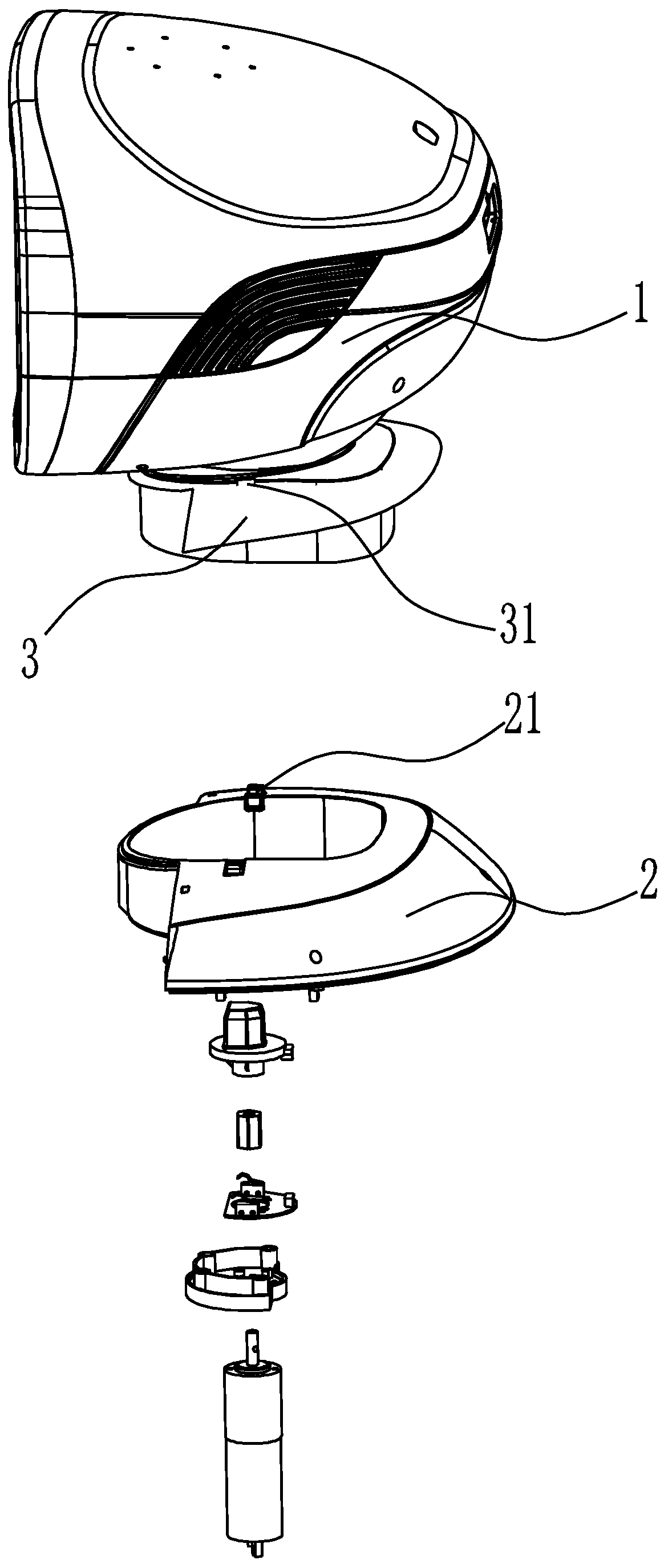
[0047] like figure 1 Shown is a robot of an embodiment of the present invention. like Figure 1-4 As shown, the robot includes a head 1 , a shoulder 2 and a neck 3 , and the head 1 and the shoulder 2 are connected through the neck 3 . The shoulder 2 is provided with a dial buckle 21, and the neck 3 is provided with a dial groove 30 for accommodating the dial buckle 21. When the head 1 (including the neck 3) is assembled with the shoulder 2, it can Insert the toggle buckle 21 into the toggle slot 30 . Thus, the head 1 is fastened and mounted on the shoulder 2 through the tongue of the dial buckle 21 being engaged with the dial buckle 30 . When the head 1 needs to be disassembled, the toggle buckle 21 can be pulled to one side, so that the tongue of the toggle buckle 21 withdraws from the toggle slot 30, and the head 1 is disconnected from the shoulder 2. It is convenient to disassemble the head 1 from the shoulder 2 .
[0048]As a preferred embodiment, the number of the di...
Embodiment 2
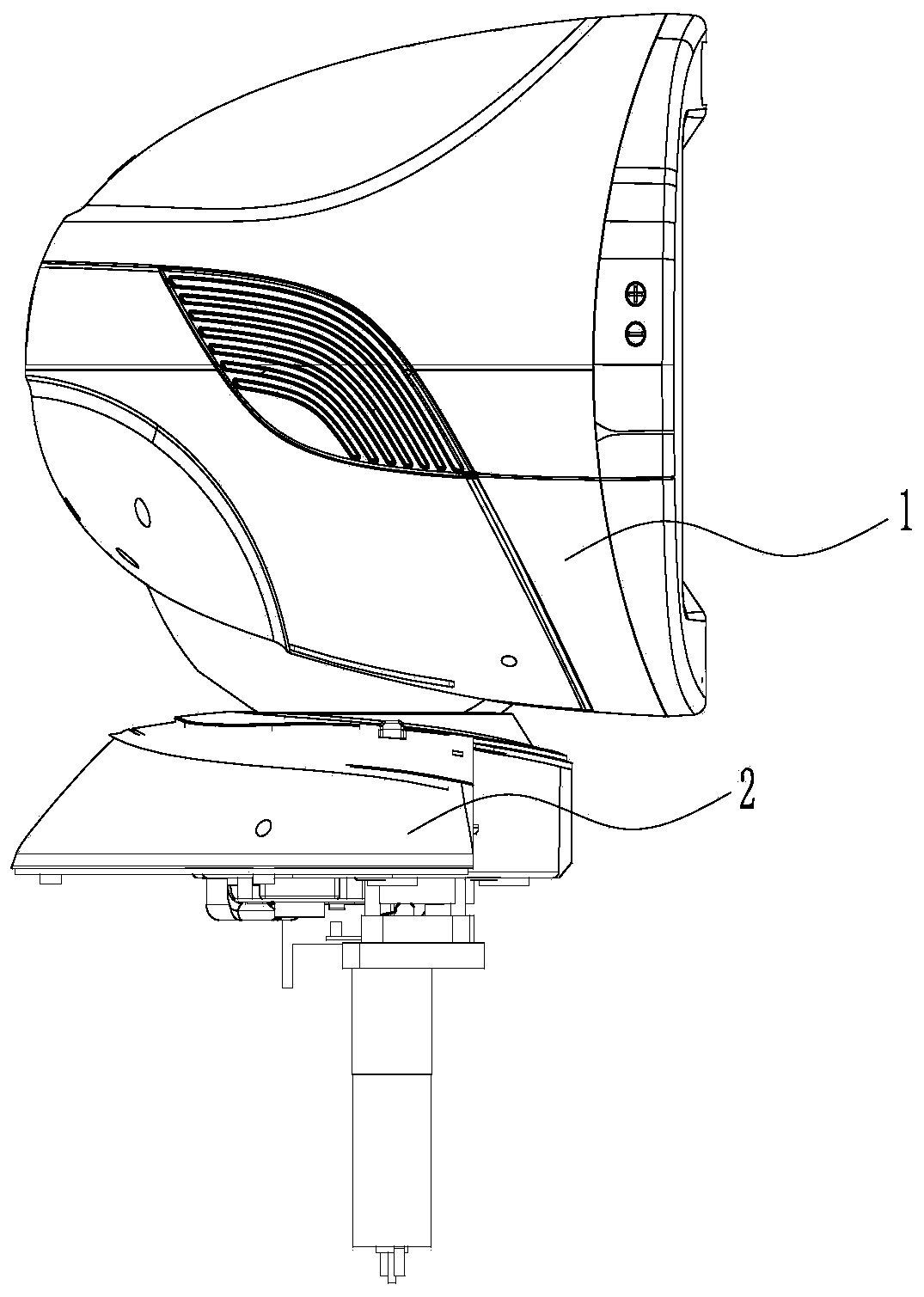
[0051] Embodiment 2 comprises above-mentioned all characteristics in embodiment 1, and the feature of embodiment 2 is: as Figure 1-7 As shown, the robot neck 3 below is provided with a neck movable mechanism, and one end of the neck movable mechanism is connected with the shoulder 2 (including the body part), and the other end of the neck movable mechanism is connected with the head 1 (including the neck above) connection. By setting the neck movable mechanism, on the one hand, the weight of the head 1 can be supported, and on the other hand, the neck movable mechanism can drive the head 1 to rotate left and right, so as to realize the flexible connection between the head 1 and the shoulder 2 .
[0052] As a preferred embodiment, the neck movable mechanism includes a fixed assembly (ie, the fixed structure of the neck 3 ), a transmission assembly 4 and a second motor 5 . Wherein, the second motor 5 includes a second motor housing 51 (playing the role of supporting the motor...
Embodiment 3
[0062] The difference between Embodiment 3 and Embodiment 2 is that the outer contour of the cross section of the second shaft coupling 41 is a regular triangle, regular quadrilateral, regular pentagon, regular heptagon, regular octagon or D-shaped, correspondingly, the coupling The cross section of the hole 43 is set in a regular triangle, a regular quadrilateral, a regular pentagon, a regular heptagon, a regular octagon or a D shape, which has the same effect of transmission and convenient disassembly.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More