

Biped robot gait stability control method based on inertial navigation system
A technology of inertial navigation system and biped robot, which is applied in the direction of program-controlled manipulators, manipulators, manufacturing tools, etc., and can solve problems such as inability to walk, complicated control process, and slow walking speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0075] In order to make the technical solutions of the present invention clearer and clearer to those skilled in the art, the present invention will be further described in detail below in conjunction with the examples and accompanying drawings, but the embodiments of the present invention are not limited thereto.
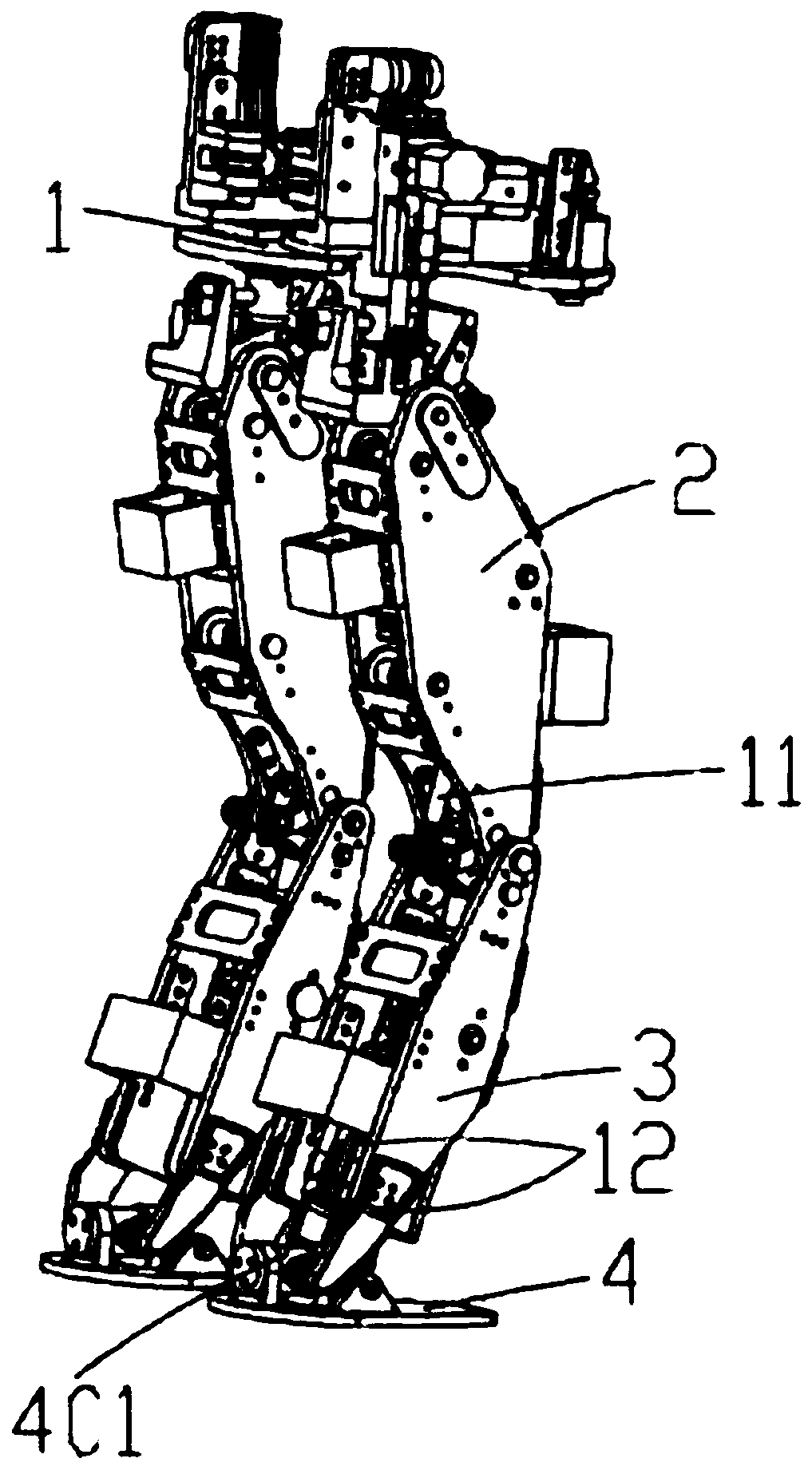
[0076] Such as figure 1 As shown, the gait stability control method of the biped robot based on the inertial navigation system provided by this embodiment involves a hydraulic biped robot, including a trunk, a thigh and a calf, between the trunk and the thigh and between the thigh and the calf All parts are controlled by hydraulic cylinders, and the movement of joints and legs is controlled by the elongation of the hydraulic cylinder shaft. The inertial navigation system is installed in the torso of the robot, which is placed horizontally with the waist of the torso of the robot to collect the attitude data of the robot. The feedback data adjusts the posture of the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More