

A driving route planning method, device and vehicle
A path planning and routing technology, which is applied to road vehicle traffic control systems, measuring devices, control devices, etc., can solve the problems that the accuracy of path planning is greatly affected, and the complexity of actual traffic cannot be considered, so as to improve reliability and The effect of accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0047] In the following, only some exemplary embodiments are briefly described. As those skilled in the art would realize, the described embodiments may be modified in various different ways, all without departing from the spirit or scope of the present invention. Accordingly, the drawings and descriptions are to be regarded as illustrative in nature and not restrictive.
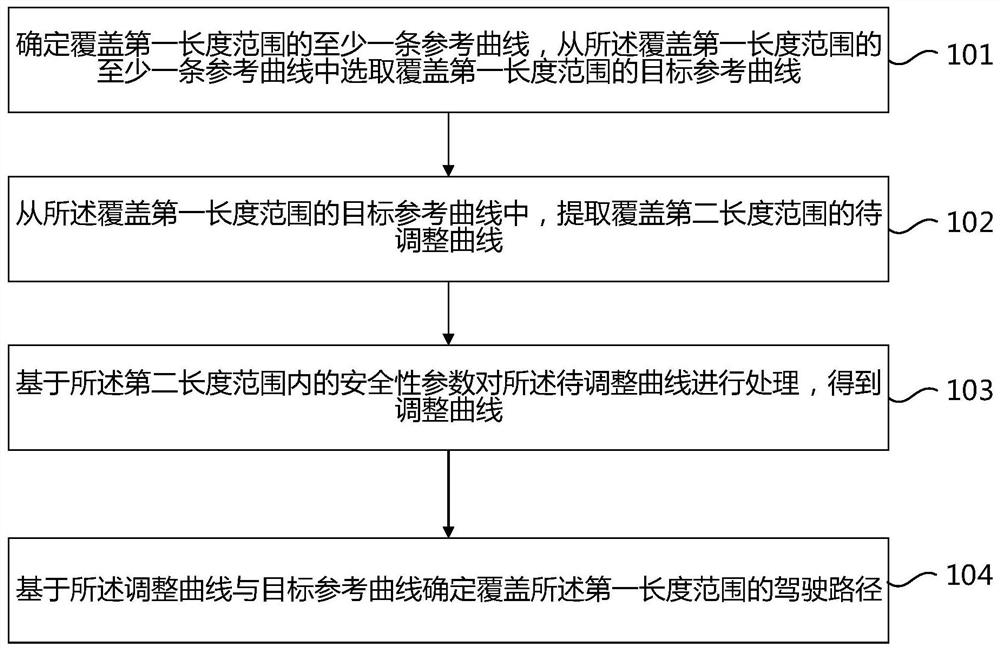
[0048] An embodiment of the present invention provides a driving path planning method, in an implementation manner, such as figure 1 As shown, a path planning method is provided, the method comprising:
[0049] Step 101: Determine at least one reference curve covering the first length range, and select a target reference curve covering the first length range from the at least one reference curve covering the first length range; wherein, the target reference curve is at least capable of Curves for avoiding obstacles within the first length range;
[0050]Step 102: Extract a curve to be adjusted covering a ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More