

End effector applicable to clamping spheroidal fruits
An end-effector, spherical-like technology, used in applications, agricultural machinery and implements, picking machines, etc., can solve the problems of high production cost and limited environmental adaptability, avoid mechanical damage, achieve high matching, and improve clamping. The effect of reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
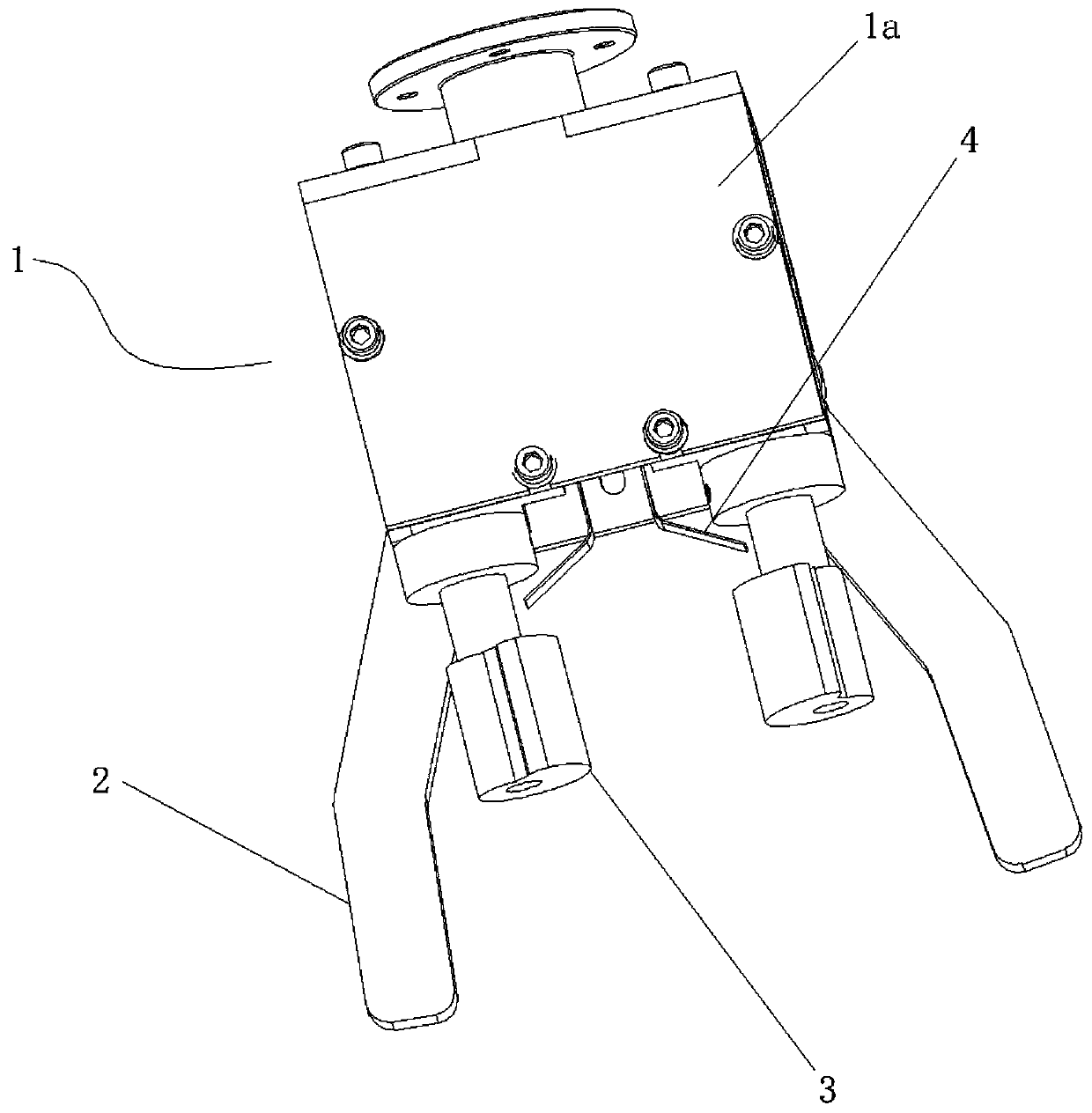
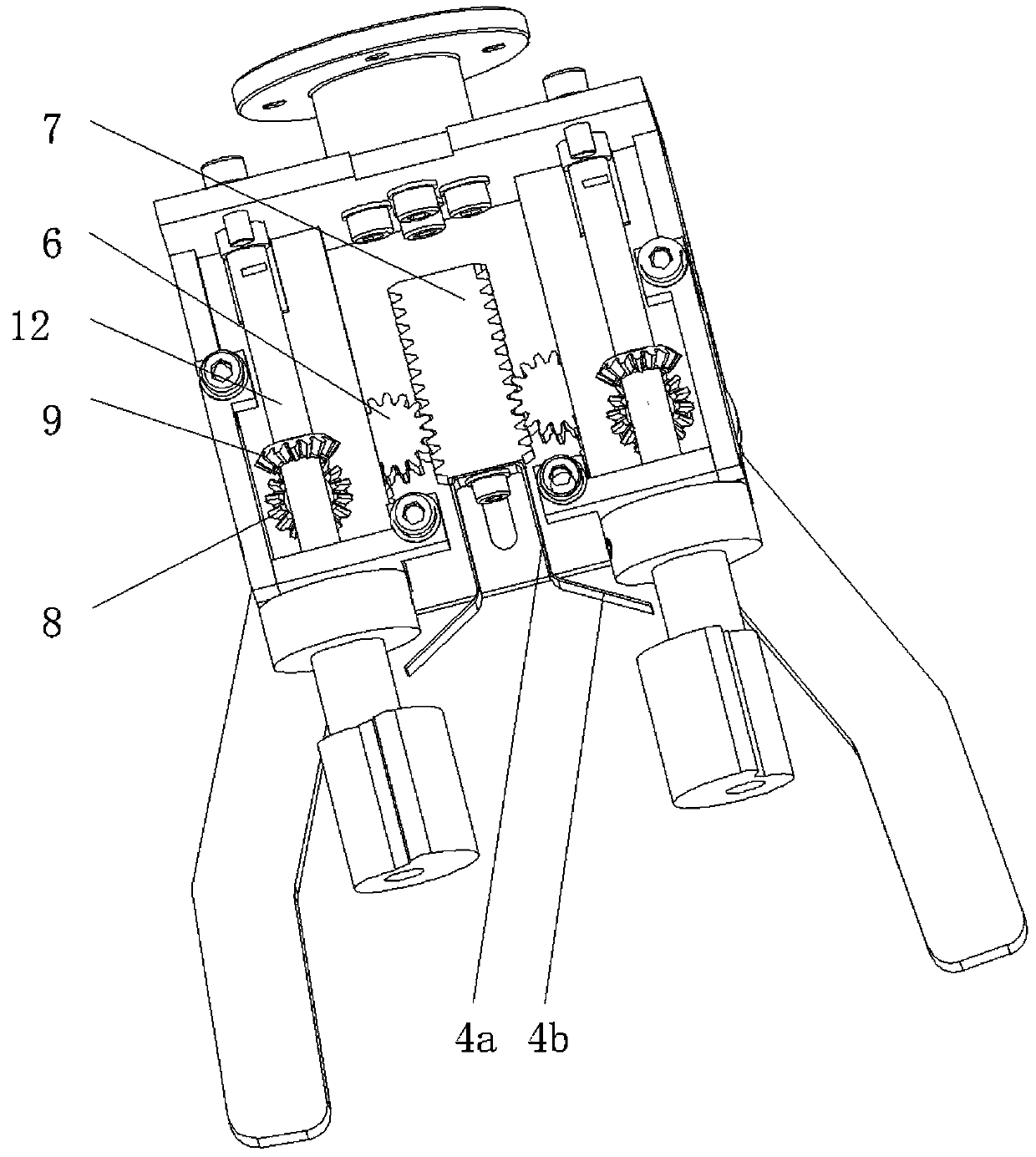
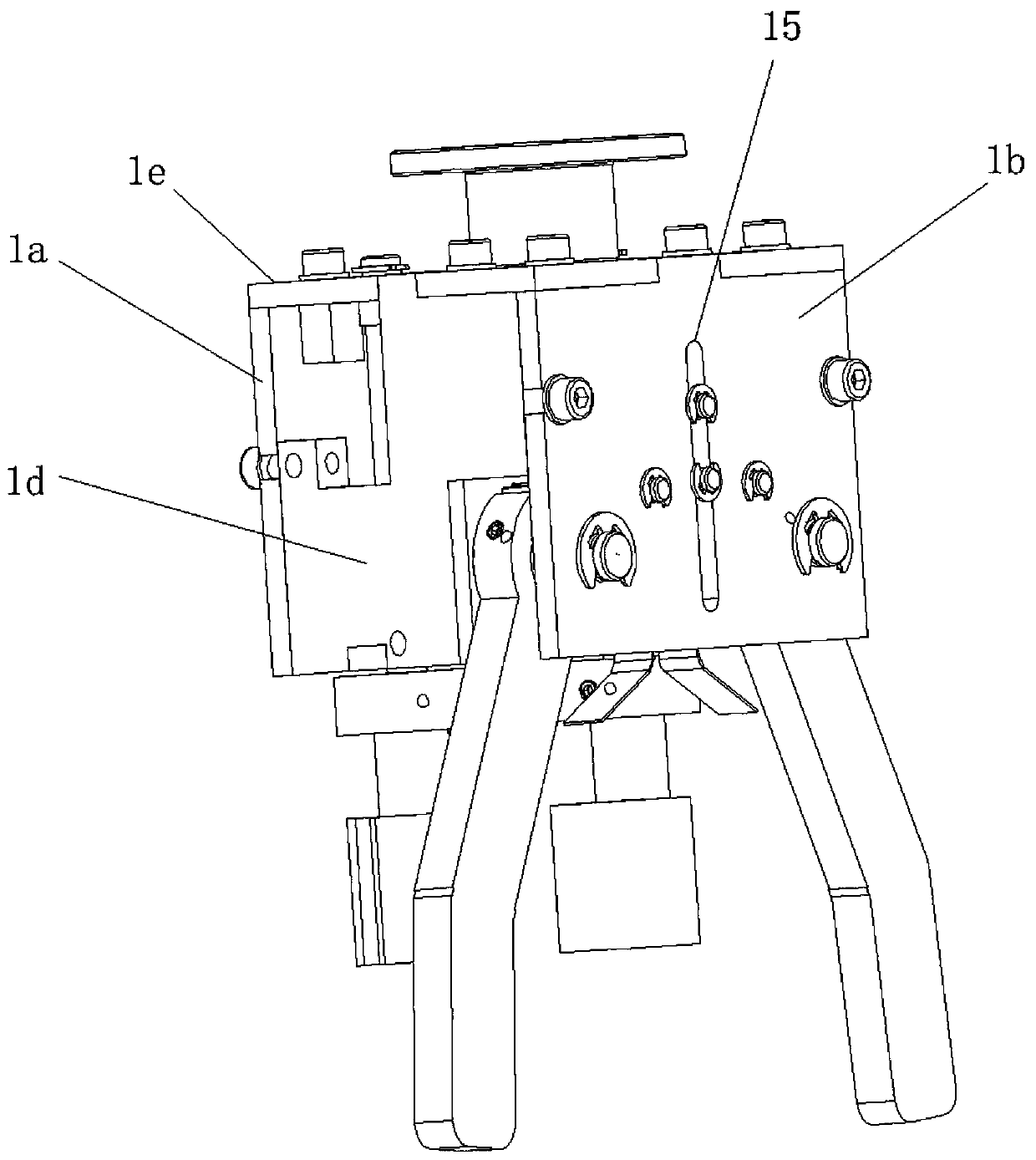
[0027] figure 1 It is a schematic diagram of the front-view three-dimensional structure of the present invention (with a front side panel); figure 2 It is a schematic diagram of the front-view three-dimensional structure of the present invention (without the front side panel); image 3 It is a schematic diagram of the rear view three-dimensional structure of the present invention (with a rear side panel); Figure 4 It is a schematic diagram of the rear view three-dimensional structure of the present invention (without the front side panel); Figure 5 It is a schematic diagram of the structure of the auxiliary finger; Figure 6 It is a schematic diagram of the structure of the lower clamp finger torque limiting device; Figure 7 It is a structural schematic diagram of the upper clamp finger torque limiting device;
[0028] The front, back, left, right, up and down directions and figure 1 corresponding to the direction in .
[0029] As shown in the figure: it includes the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More