

Variable-rigidity ankle rehabilitation orthosis and motion control method thereof
A technology of orthosis and stiffness, which is applied in the field of rehabilitation medical robots, can solve problems such as potential safety hazards, high energy consumption, time and physical consumption of physical therapists, etc., and achieve the effect of reducing current and improving energy efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
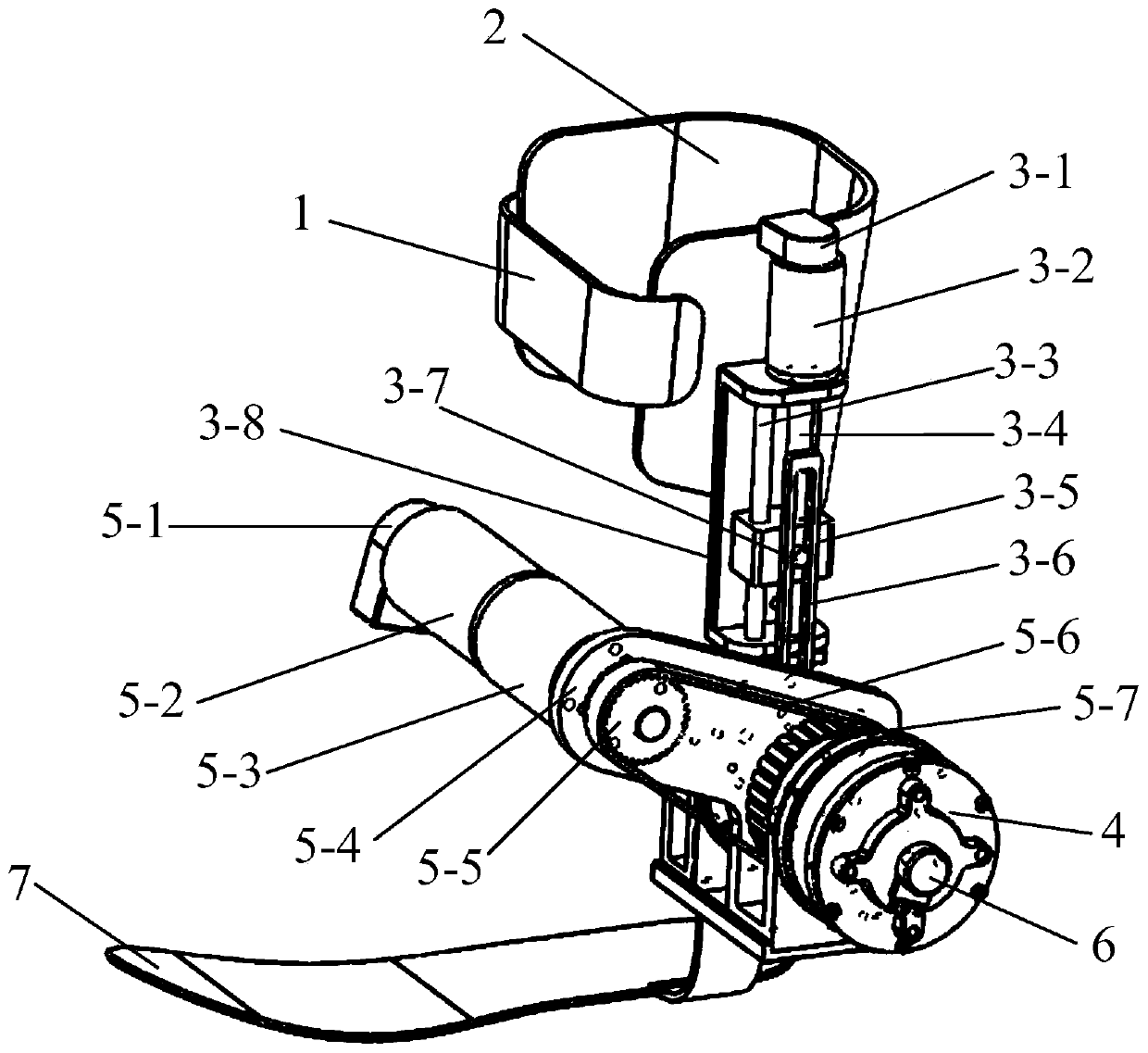
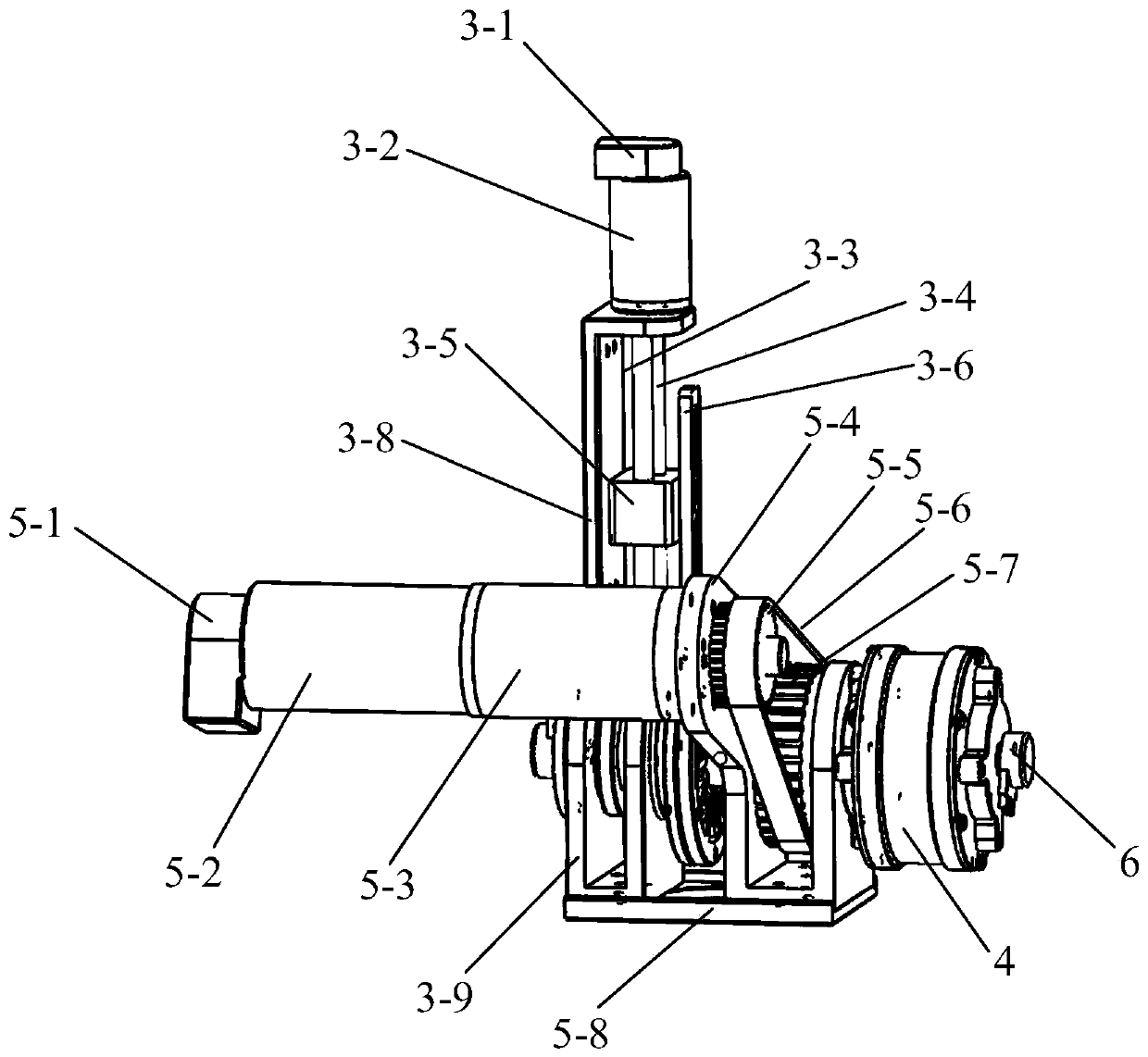
[0043] figure 1 It is a three-dimensional structure diagram of the ankle-foot rehabilitation orthosis of the present invention. Such as figure 1 As shown, an ankle-foot rehabilitation orthosis based on a variable stiffness magnetorheological elastic driver includes a strap 1, a calf support 2, a foot plate 7, a variable stiffness magnetorheological elastic driver, a human-computer interaction system, and a sensor and Control system; based on the variable stiffness magneto-rheological elastic driver driving, braking, hybrid braking and stiffness adjustment functions, the ankle-foot rehabilitation orthosis can realize rehabilitation training in the directions of ankle-foot dorsiflexion and plantarflexion for hemiplegic patients ; The human-computer interaction system is based on an intelligent terminal application program, which can provide various func...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More