

A Multi-working Condition Pneumatic Robot
A robot and multi-condition technology, applied in the field of robotics and equipment technology
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
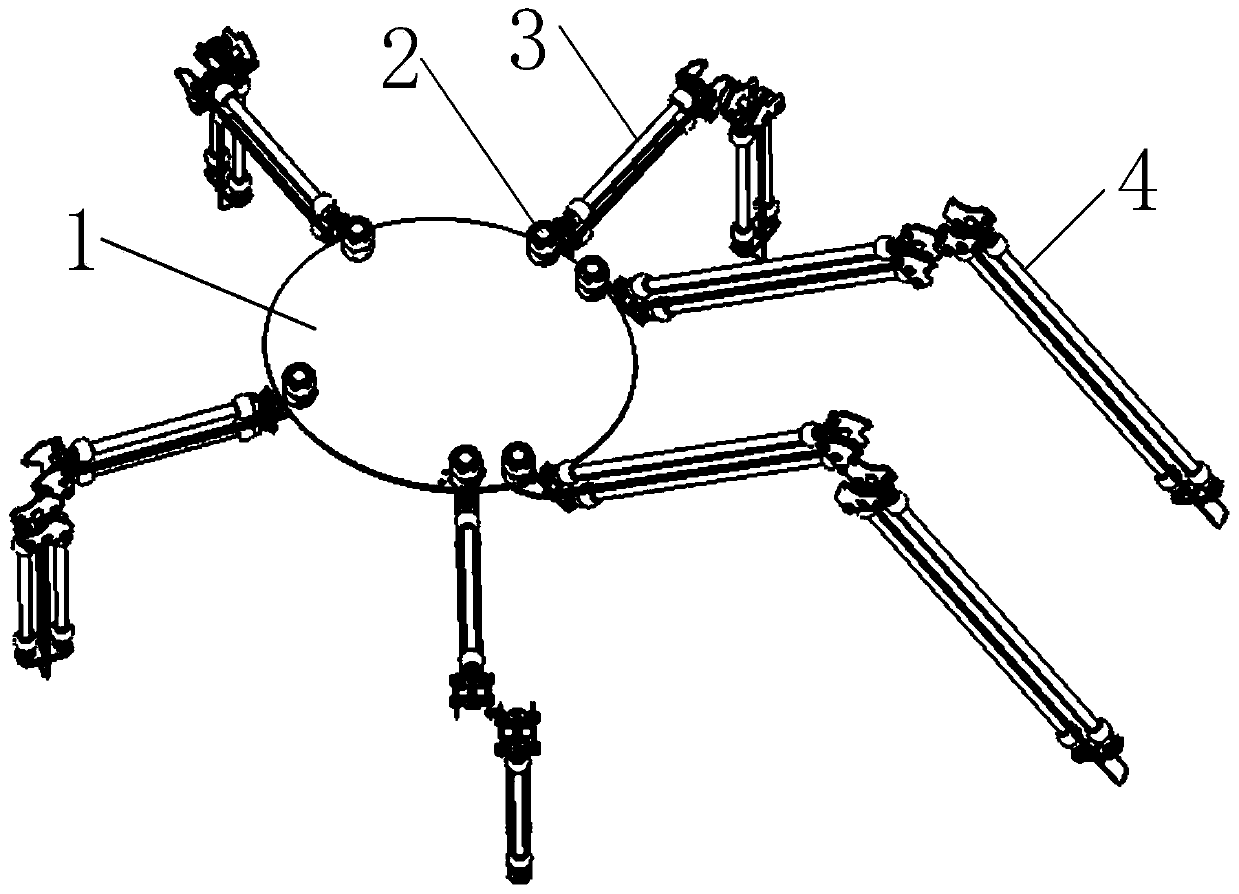
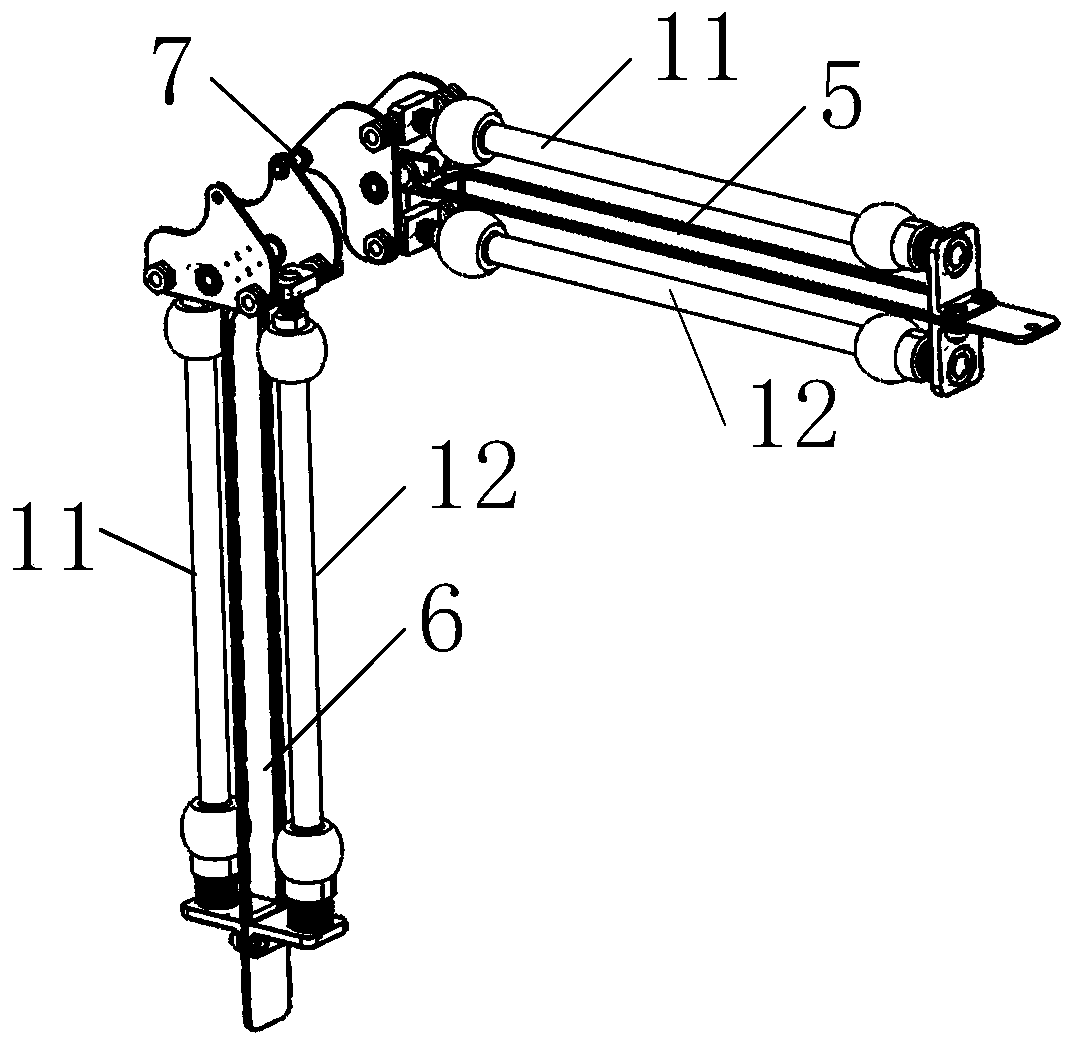
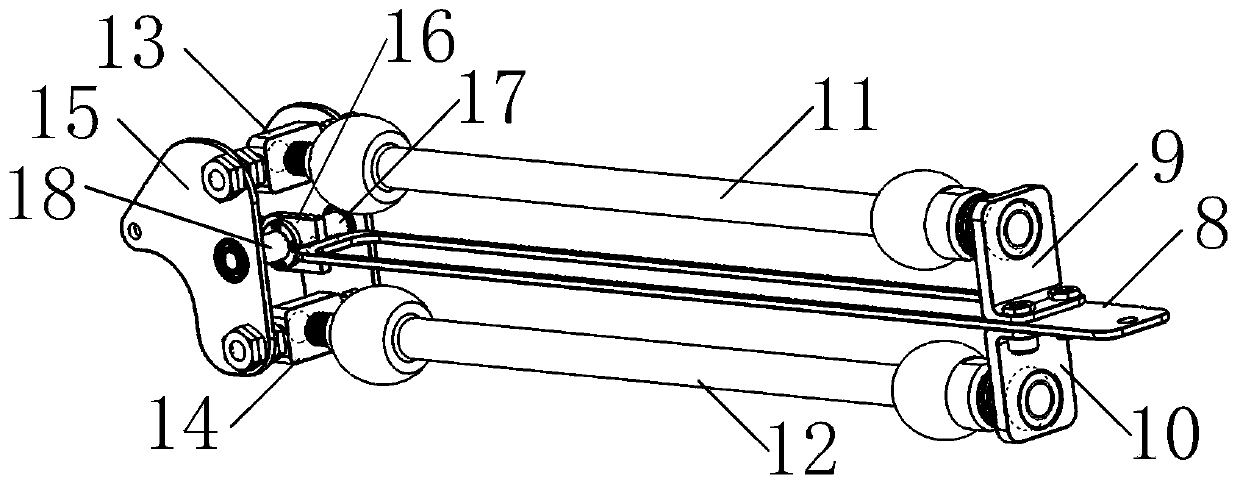
[0036] A multi-working-condition pneumatic robot, comprising: a fixed plate 1, four short legs 3 are arranged on one side of the fixed plate 1, and two long legs 4 are arranged on the other side, and the short legs 3 and the long legs 4 respectively pass through The swing cylinder 2 is fixed on the fixed plate 1, the short leg 3 and the long leg 4 are respectively provided with the first section 5 of the support leg, the second section 6 of the support leg, and the first section 5 of the support leg and the second section 6 of the support leg pass through the support The connecting shaft 7 in the middle of the legs is connected; the first pneumatic muscle fixing plate 9 and the second pneumatic muscle fixing plate 10 are respectively arranged on both sides of the support plate 8 of the first section 5 of the outrigger or the second section 6 of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More