

Livestock and poultry information sensing robot based on autonomous navigation and map construction method
An autonomous navigation and information perception technology, applied in location-based services, services based on specific environments, communication between vehicles and infrastructure, etc., can solve the problem of inability to accurately match the relative position of animal information and the inability of robots to determine the unique position Posture and other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0090] In order to make the purpose, technical solutions and advantages of the present invention clearer, the technical solutions, principles and features of the present invention will be described below in conjunction with the accompanying drawings. The examples given are only used to explain the present invention, and are not used to limit the scope of the present invention. Based on the embodiments of the present invention, other embodiments obtained by persons of ordinary skill in the art without making creative efforts all belong to the protection scope of the present invention.
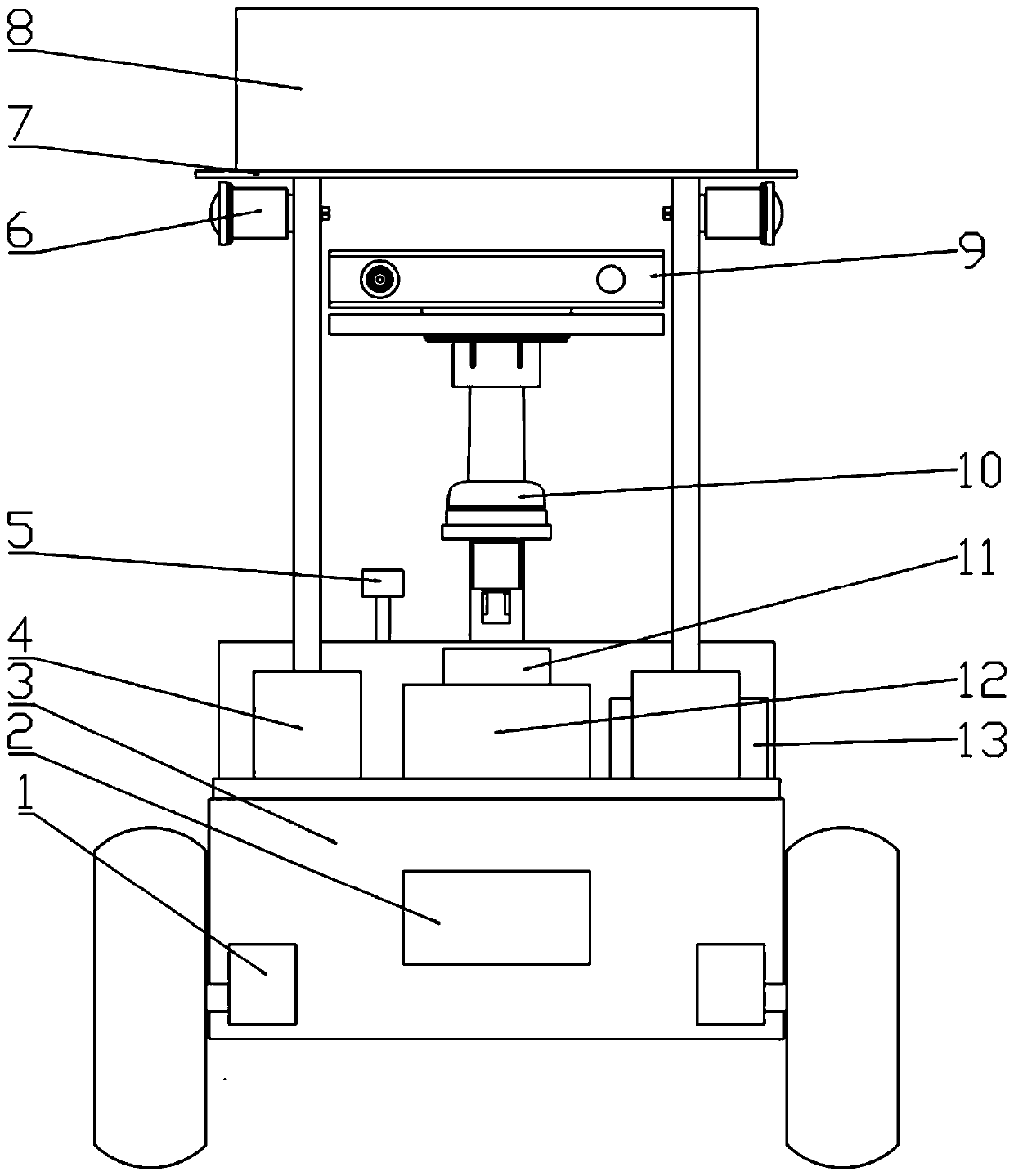
[0091] Such as figure 1 As shown, it includes a four-wheeled car 3 and an autonomous navigation system, a motion module, and an information collection module installed on the four-wheeled car 3 , and a lifting platform 7 is arranged above the four-wheeled car 3 .
[0092] Such as figure 1 As shown, the autonomous navigation system includes a lidar 10 for acquiring surrounding environment inform...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More