

Method and system for detecting vehicle motion state based on autonomous sensor
A state detection and sensor technology, applied in the direction of instruments, measuring devices, surveying and navigation, etc., can solve the problems of inaccurate models and insufficient target tracking accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
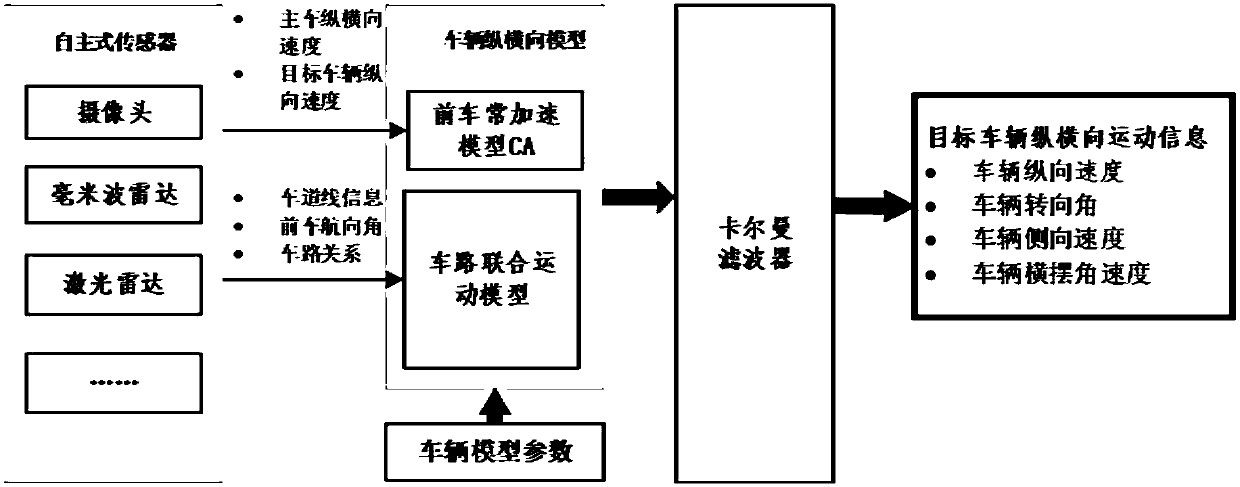
[0028] This embodiment specifically includes the following steps:
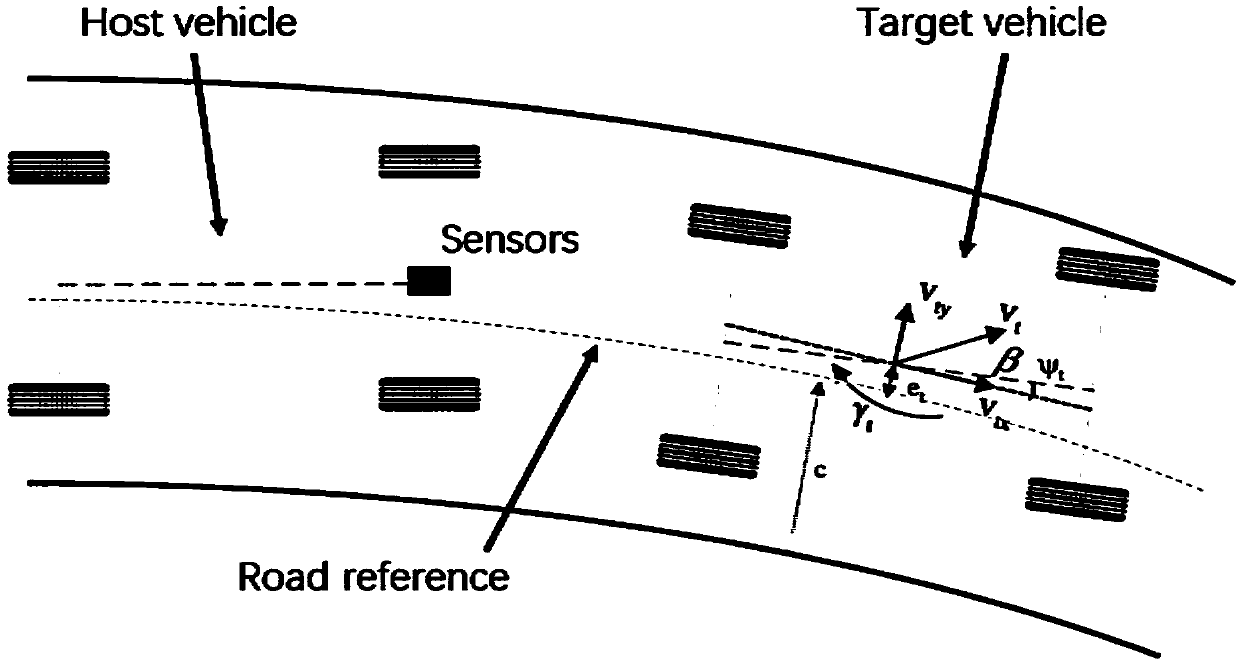
[0029] Step 1. Acquisition of road and vehicle motion information based on active sensors equipped with the vehicle.
[0030] 1.1) The rich road image information is obtained through the visual sensor, followed by grayscale processing:
[0031] V Gray =0.3×V Red +0.59×V Green +0.11×V Blue ; where V Gray is the gray value after grayscale processing, V Red , V Green , V Blue , are the corresponding RGB values of the color image
[0032] 1.2) Threshold segmentation: Among them: f(x, y) represents the input image, g(x) represents the output image, and T represents the selected threshold.
[0033] 1.3) Canny edge detection operator, which detects straight lines through Hough transform according to known data points;
[0034] 1.4) Estimate the road curvature by the least squares method of curve fitting to realize the road reference, that is, the detection including lane line, lane centerline and road c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More