

End path planning algorithm for mortar spraying and plastering construction robot
A construction robot and path planning technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of high complexity and unsuitable planning for cement mortar spraying tasks, and achieve high execution accuracy and meet the spraying tasks effect of demand
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be further described below in conjunction with the accompanying drawings.
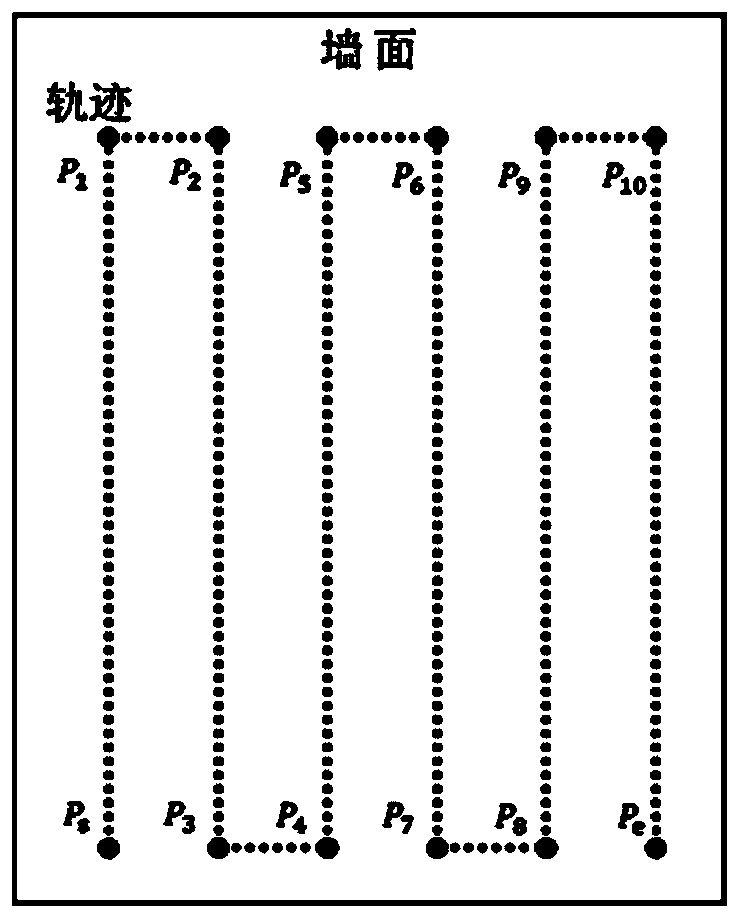
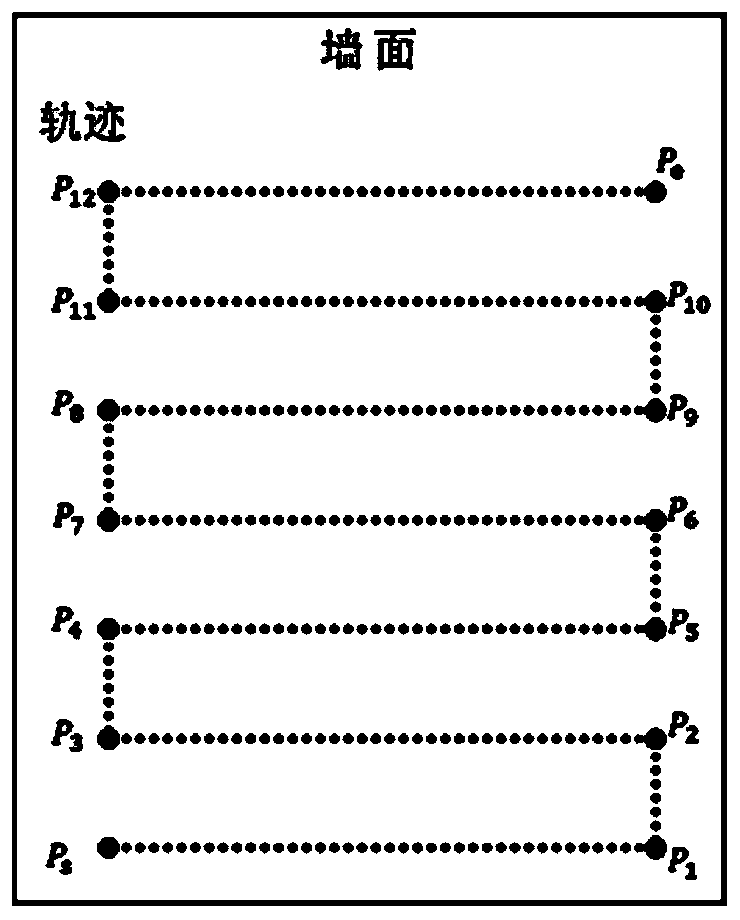
[0031] A terminal path planning algorithm for a mortar spraying construction robot. For different operation walls and task methods, regardless of the current position of the robotic arm, first generate a task execution trajectory that meets the process requirements; then start from the current position of the robotic arm before the work starts Start and complete the free path planning from the current position to the initial position:
[0032] Task trajectory planning: Determine the task trajectory point where the end of the robot arm moves from the initial position of the task to the end position of the task, calculate the dynamic inverse ungroup for each trajectory point, traverse each inverse solution, and find the path with the highest traversal success rate as the final mission trajectory planning;
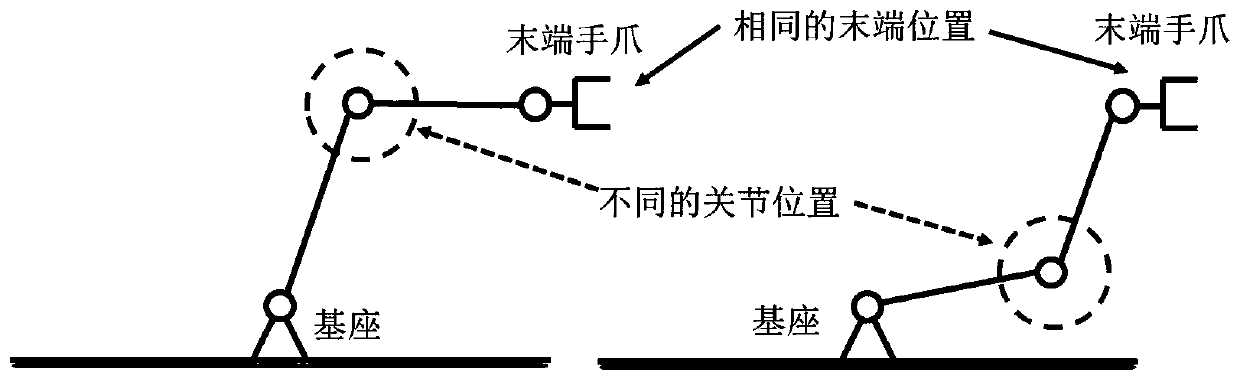
[0033] Free trajectory planning: Calculate the joint displaceme...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More