

A sliding mode-based automatic parking torque control method for unmanned vehicles
An unmanned vehicle and automatic parking technology, which is applied in the field of automatic parking torque control of unmanned vehicles based on sliding mode, can solve problems affecting application value and loss, achieve good application value, reduce serious dependence, and improve parking The effect of precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0023] In order to illustrate the embodiment of the present invention or the technical solution in the prior art more clearly, the technical solution of the present invention will be described in detail below. Apparently, the described embodiments are only some of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, all other implementations obtained by persons of ordinary skill in the art without making creative efforts fall within the protection scope of the present invention.
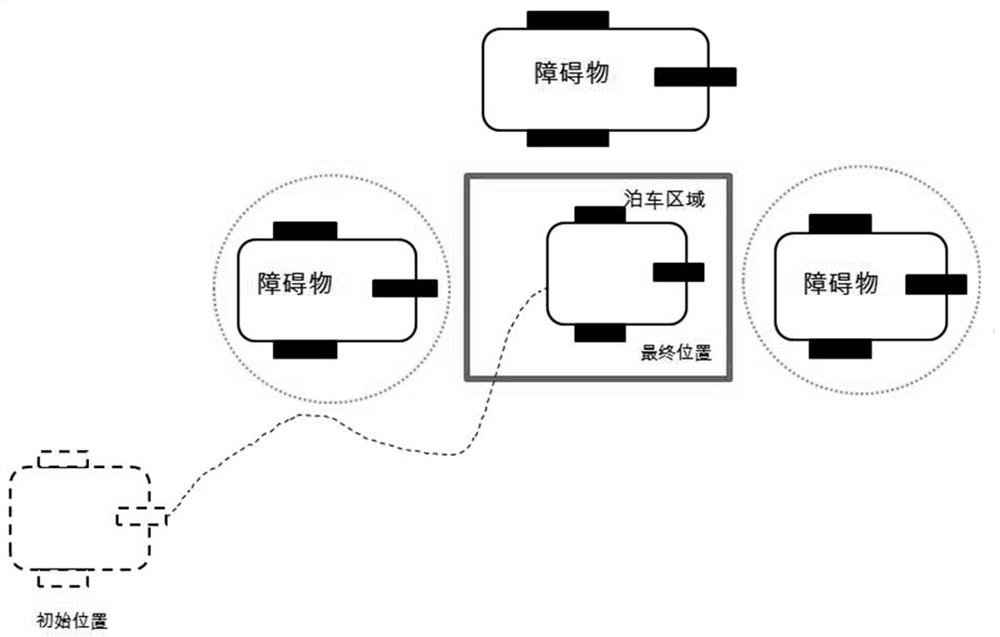
[0024] See attached figure 1 , a sliding mode-based automatic parking torque control method for an unmanned vehicle provided by the present invention will now be described.
[0025] A sliding mode-based automatic parking torque control method for unmanned vehicles, comprising the following steps:
[0026] ①Using GPS to identify, locate and measure the unmanned vehicle, the target parking area and the obstacles in the target parking area, and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More