

Under-actuated unmanned ship cluster cooperative guidance structure and design method
An unmanned ship, underactuated technology, applied in two-dimensional position/channel control and other directions, can solve the problems of underactuated system, control influence, unfavorable collaborative control, etc., and achieve broad application prospects, high application value, and simple structure. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
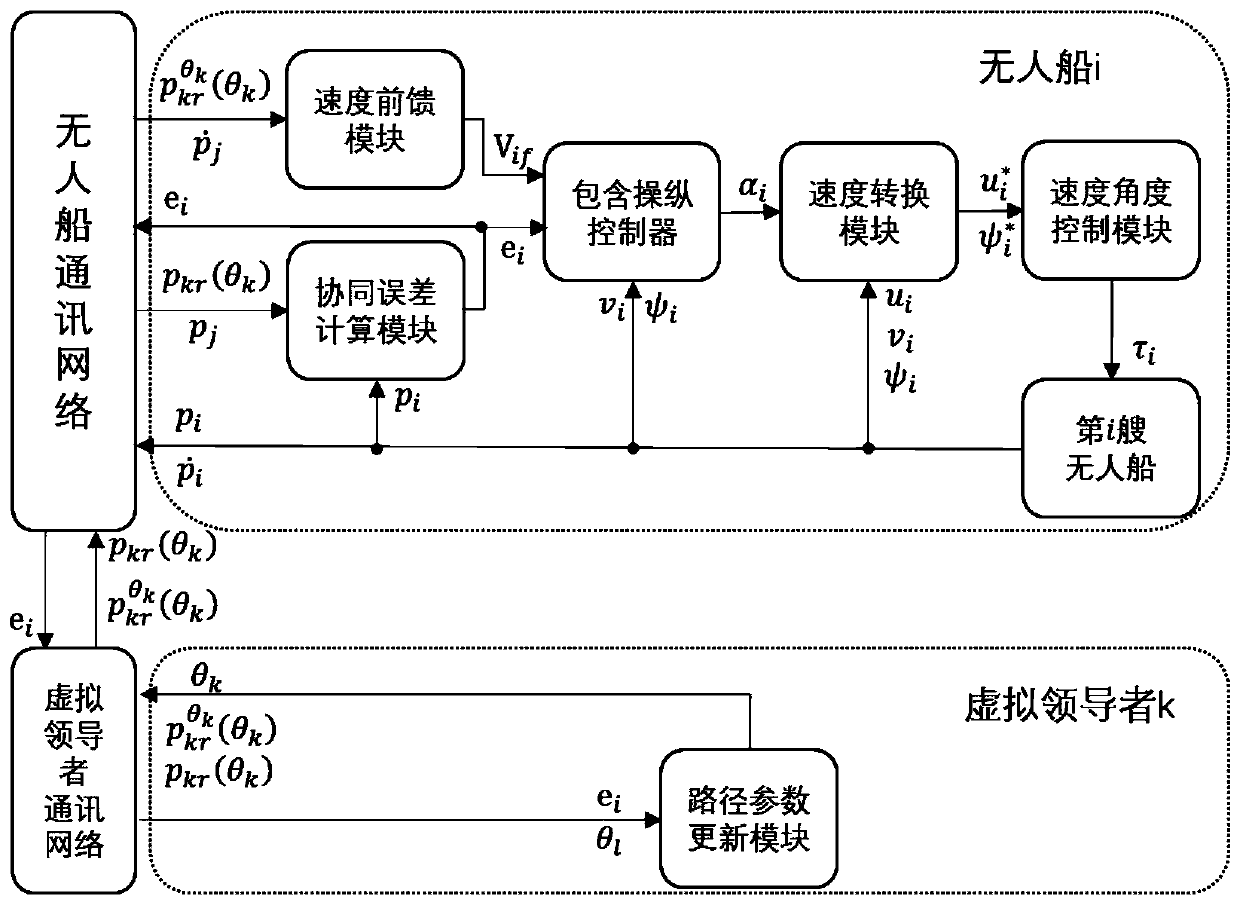
[0046] The present invention will be further described below with an example of the included manipulation control of five underactuated unmanned ships. figure 1 It is a structural schematic diagram of the present invention, in which the speed and angle control module is the dynamic controller of the underactuated unmanned ship, which converts the reference speed and angle signals output by the speed conversion module into control force signals and outputs them to the underactuated unmanned ship. The kinematics model of the underactuated unmanned ship is shown in formula (1).
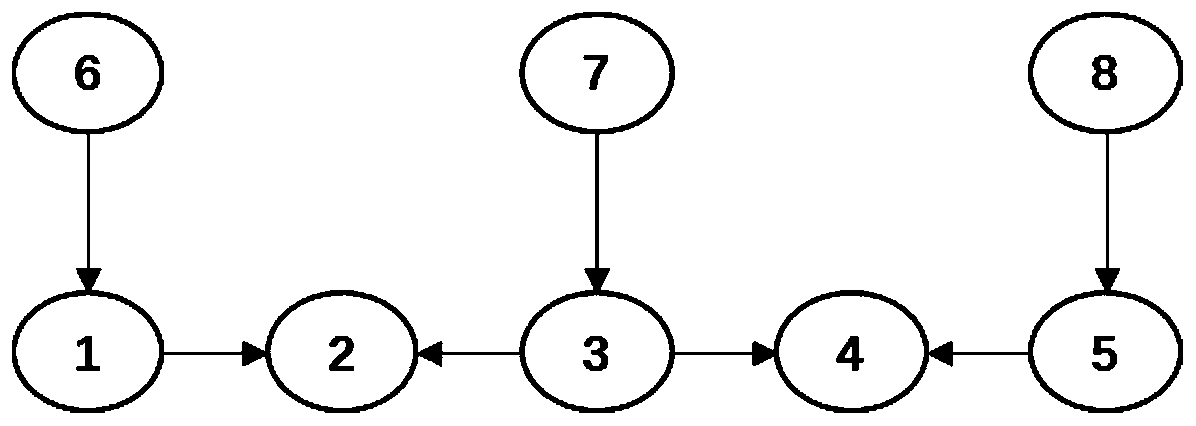
[0047] The communication topology of five underactuated unmanned ships in the control process is as follows: figure 2 As shown, labels 1-5 in the figure represent underactuated unmanned ships, and labels 6-8 represent reference paths. Ships 1, 3, and 5 obtain path information from reference paths 6, 7, and 8 respectively; Ships 1, 3 send path parameter information to Ship 2, Ships 3, 5 send path parame...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More