

A Method for Two-Dimensional Dynamic Simulation and Display of Manipulator Trajectory
A technology of running trajectory and dynamic simulation, which is applied to manipulators, program-controlled manipulators, manufacturing tools, etc., to achieve accurate operation judgment and eliminate flickering effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The technical solution of the present invention is further described below, but the scope of protection is not limited to the description.
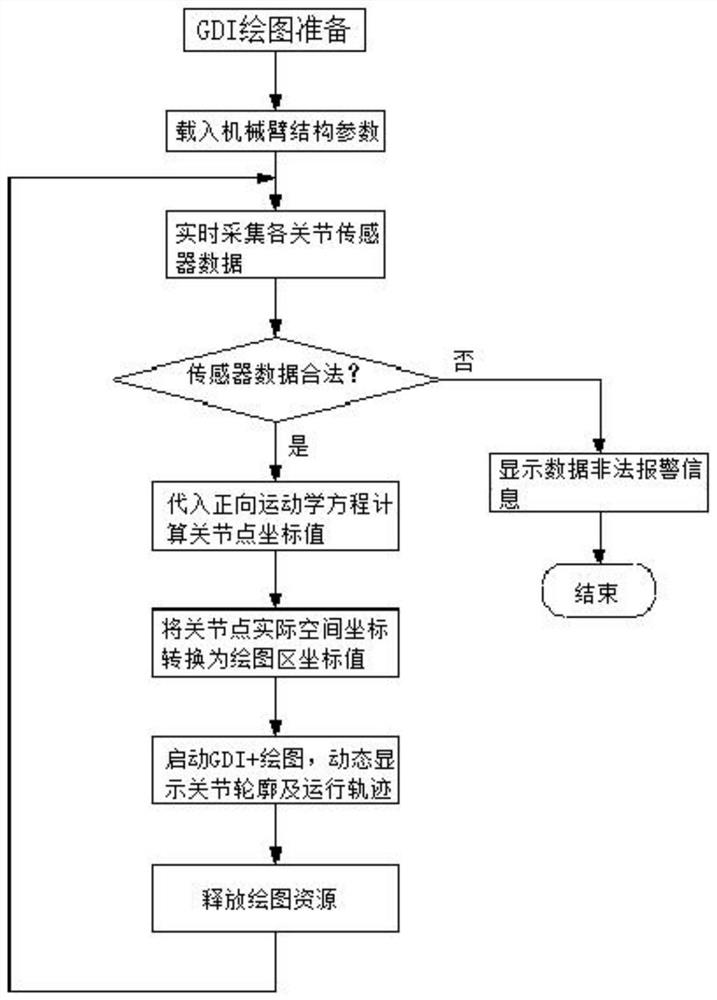
[0040] Such as figure 1 As shown, a method for two-dimensional dynamic simulation display of the running track of a manipulator includes the following steps:
[0041] (1) GDI+ drawing preparation;
[0042] (2) Obtain the information of each joint point of the robotic arm in real time;
[0043] (3) Convert the spatial position and attitude information of each joint point of the manipulator into the coordinate value of the drawing point in the drawing area and the rotation angle value;
[0044] (4) Start GDI+ drawing, and dynamically draw the outline and running track of the robotic arm;
[0045] (5) Repeat steps (2)-(4) to draw the amplitude, telescopic and rotation movements of the robot arm in real time, and form a coherent trajectory of the robot arm.
[0046] The GDI+ drawing preparation in step (1) includes: initializing GD...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More