

Pilotless vehicle path planning and controlling system and method
An unmanned vehicle and path planning technology, applied in two-dimensional position/fairway control, road network navigator and other directions, can solve the problem of inability to carry out large-scale transportation, insufficient local path planning ability, and limited number of people carrying at the same time. problems, to achieve the effect of improving user experience, improving riding experience, reducing time and economic losses
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0067] The present invention will be described in detail below in conjunction with specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be noted that those skilled in the art can make several modifications and improvements without departing from the concept of the present invention. These all belong to the protection scope of the present invention.
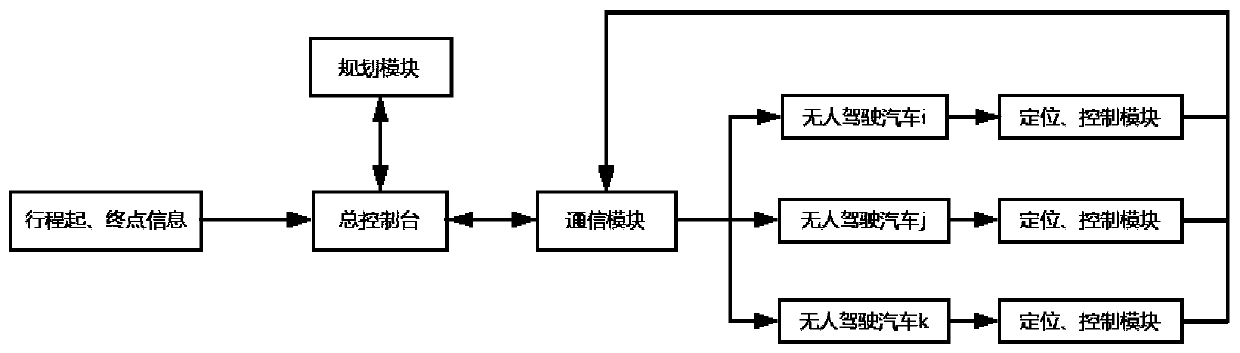
[0068] like figure 1 and figure 2 As shown, the embodiment of the present invention provides a path planning and control system for unmanned vehicles, including: a travel information acquisition module, a general control module, a path planning module, a communication module, and a positioning control module; wherein:
[0069] The itinerary information acquisition module acquires the starting point and end point information of the itinerary as the input information of the system, specifically th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More