

A Fractional Model Identification Method of Servo System Considering Delay
A servo system and model identification technology, applied in the field of servo control, can solve the problems of ignoring the delay link, the friction force cannot be strictly proportional to the speed, and the fractional order characteristics are not considered, so as to achieve the effect of eliminating the influence.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] In order to further understand the features, technical means, and specific objectives and functions achieved by the present invention, the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
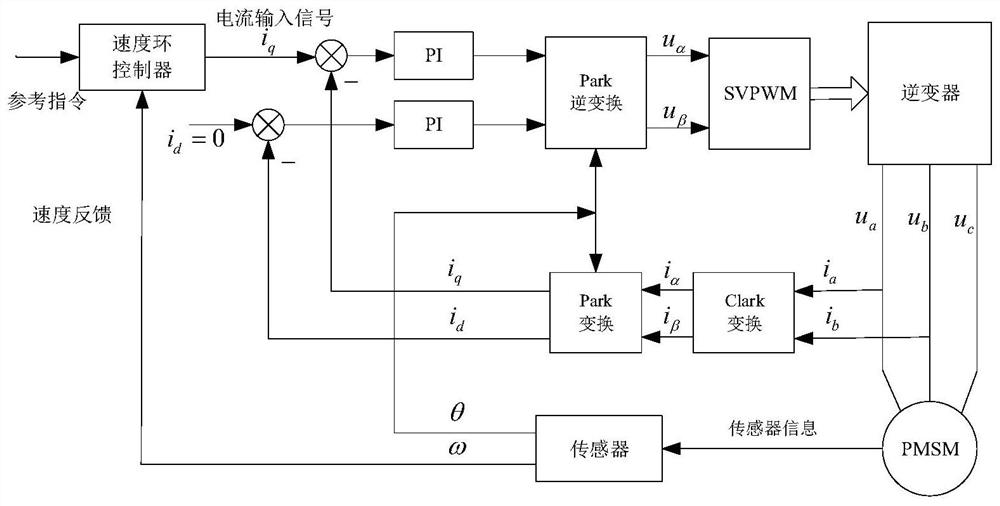
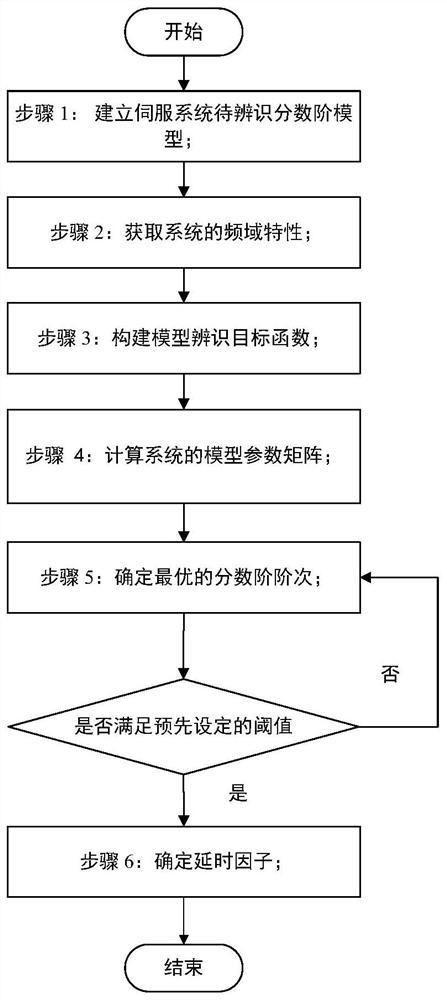
[0058] as attached figure 1 , 2 As shown in and 3, the corresponding servo system of the present invention inputs a reference command to the speed loop controller, and the speed loop controller outputs the current input signal i q to the PI controller, and then the PI controller outputs Park inverse transformation, and at the same time there is a current signal i dInput to another PI controller, this PI controller also outputs to Park inverse converter, two PI controllers are connected with SVPWM space vector pulse width modulation, SVPWM space vector pulse width modulation output to inverter, inverter Output three-way voltage u a , u b , u c to the servo motor PMSM, to the voltage line u a , u ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More