Automation method for IMU-camera joint calibration
A joint calibration and IMU-based technology, applied in image data processing, instruments, calculations, etc., can solve problems that are not suitable for large-scale batch production, success and consistency are difficult to be guaranteed, and achieve low impact noise and simple operation Convenience and smooth movement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
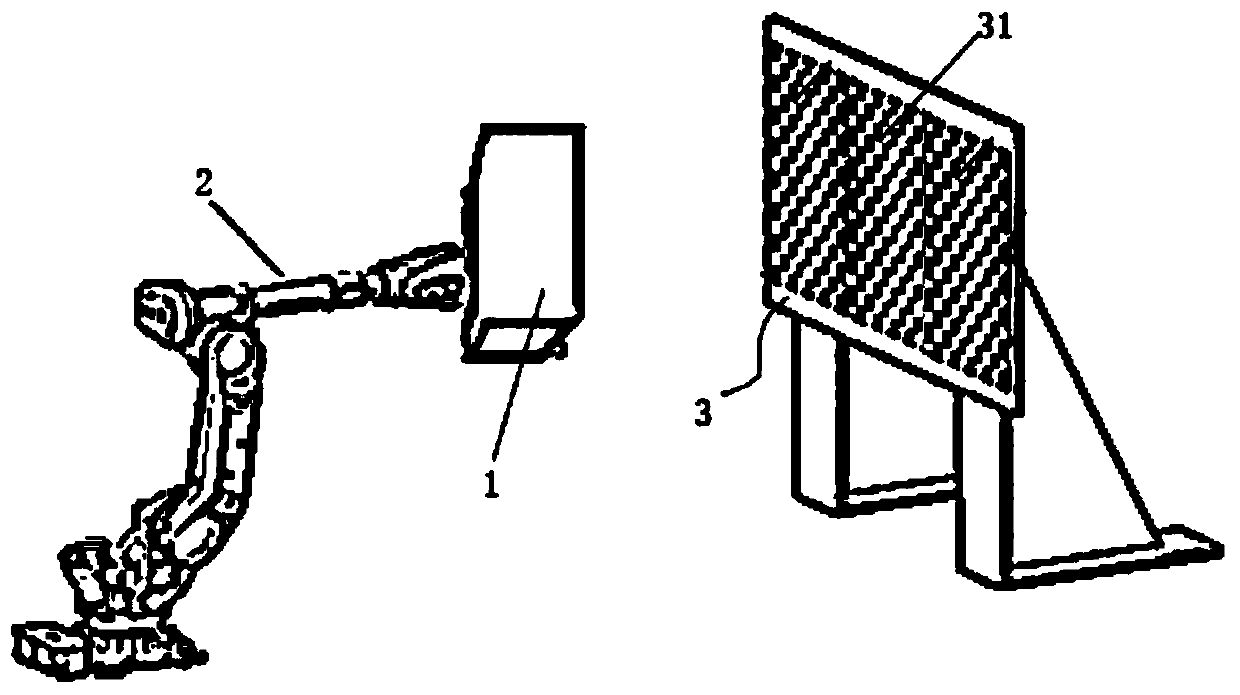
[0014] An automated method for joint IMU-camera calibration, see figure 1 : Install the IMU and camera on the equipment to be calibrated 1, and then fix the equipment to be calibrated 1 on the output end of the six-axis mechanical arm 2. In the initial state, a calibration plate 3 is set directly in front of the IMU and the camera to drive the six-axis mechanical arm The output end of the arm 2 drives the device 1 to be calibrated to move according to the set trajectory. During the movement, the calibration board 3 is within the field of view of the camera. During the movement, the original IMU data is collected and saved according to the IMU data output frequency, and at the same time press the The data output frequency collects and saves the camera image data, and then calculates the saved IMU raw data and camera image data through the kalibr toolbox to obtain the transformation matrix of the IMU coordinate system and the camera coordinate system, as well as the calibration e...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com