A magnetron variable friction and variable leg length soft crawling robot
A crawling robot, variable friction technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of low power density, slow response speed, non-adjustable leg length, etc., to achieve the effect of improving power density
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The technical solutions of the present invention will be described in detail below with reference to the accompanying drawings and embodiments.
[0030] Embodiments of the present invention provide a magnetically controlled variable friction and variable leg length soft crawling robot, including a variable friction mechanism and a variable leg length mechanism.
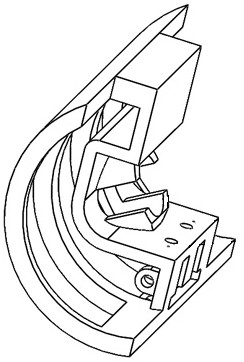
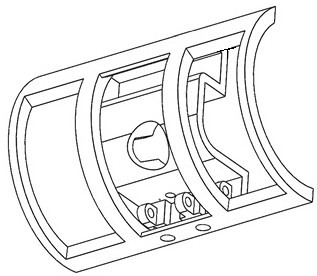
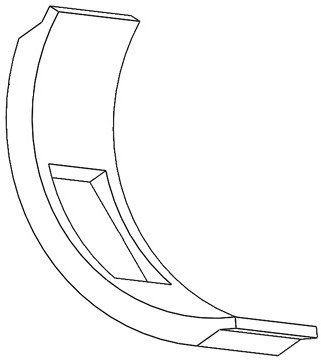
[0031] like Figures 1 to 6 As shown, the variable friction mechanism includes a bracket 1 , a torsion spring 2 , a magnet 3 , an iron sheet 4 , a variable friction sheet 5 , and a rubber sheet 6 . The bracket 1 includes an arcuate inner layer and an arcuate outer layer. A through hole is arranged in the middle of the arcuate inner layer for fixing the cylindrical magnet 3. The arcuate outer layer passes through the slope structure and the steps of the variable friction plate 5. The surface is matched to fix the variable friction plate 5, the outer side of the variable friction plate 5 is pasted with a rubber ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More