

Automatic spraying system and method based on workpiece contour information three-dimensional reconstruction
An automatic spraying and three-dimensional reconstruction technology, applied in the direction of spraying devices, can solve the problems of low flexibility, uneven local spraying, and long time-consuming preset spraying paths, so as to achieve the effect of improving efficiency and improving work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
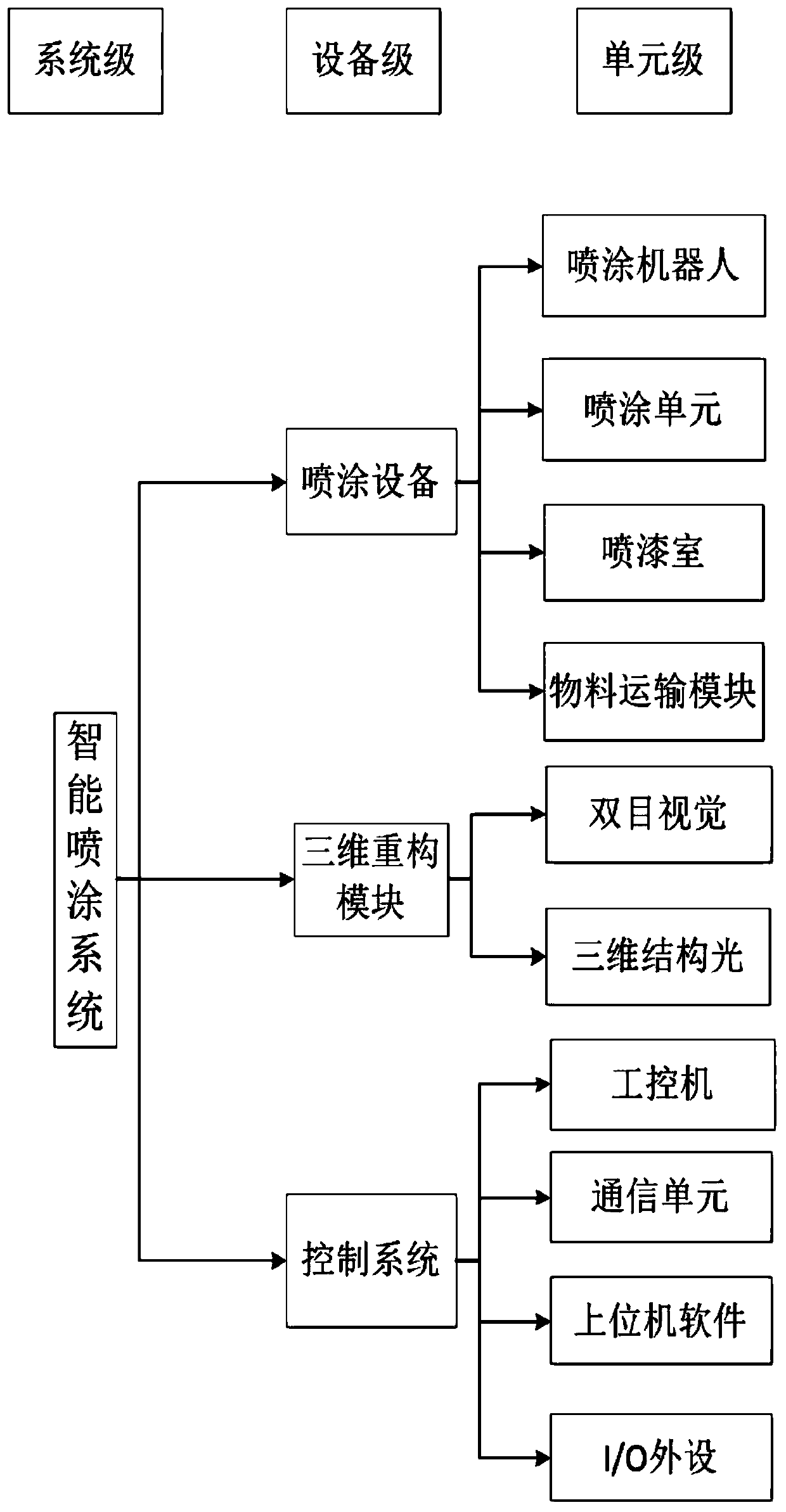
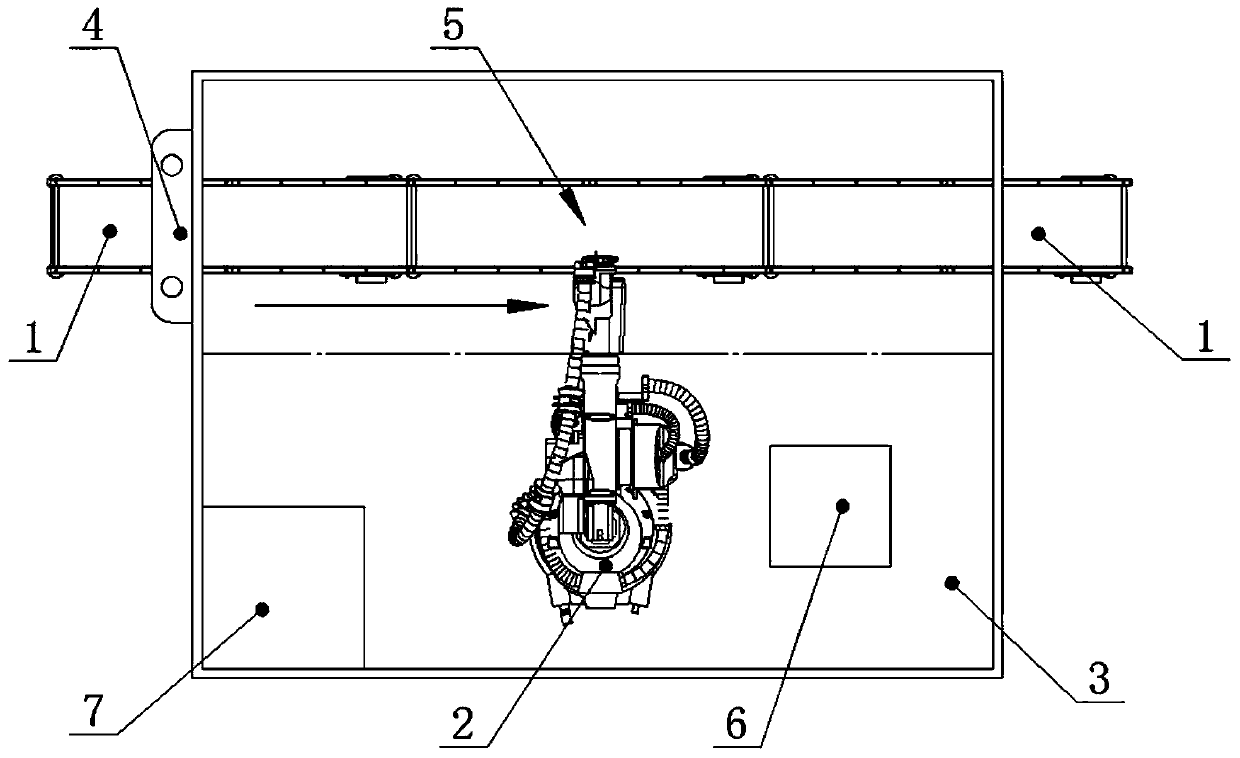
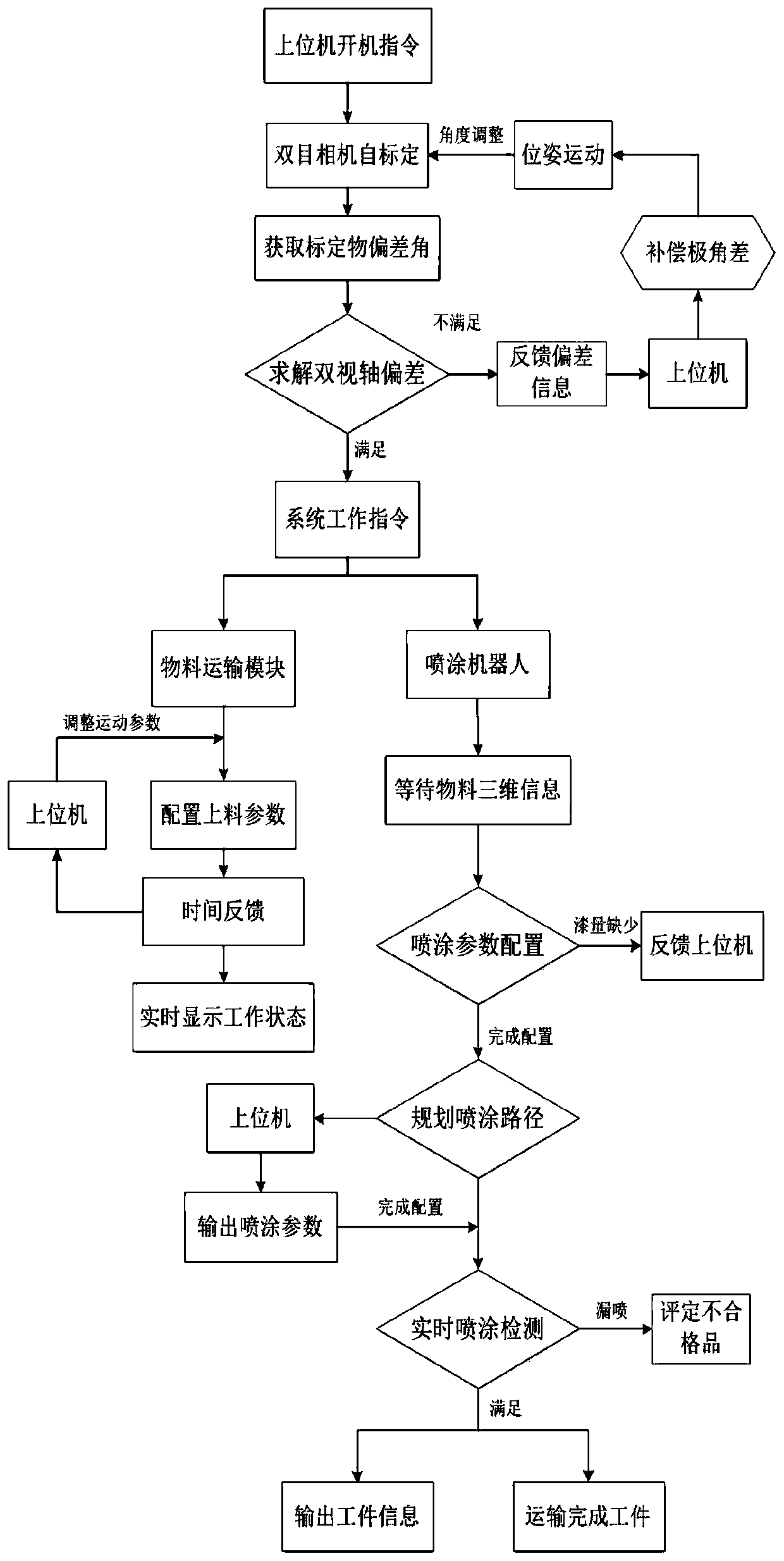
[0028] The invention discloses an automatic spraying system based on three-dimensional reconstruction of workpiece contour information, which includes a control system, a three-dimensional reconstruction module 4 and automatic spraying equipment. The unit is used to obtain the phase and reflection time parameters of the three-dimensional structured light reflection of the workpiece to be sprayed, extract the three-dimensional data according to the different parameters and fit the data into continuous interactive contour modeling information and send it to the control system, and solve it through coordinate transformation The position and posture of the whole work in the world coordinate system of the spraying robot are obtained, and the spraying path is automatically planned. The painting equipment includes a spraying room 3, which is connected to the control system, and can automatically spray the workpiece to be sprayed according to the spraying path.
[0029] see figure 1 a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More