

Map updating control method and system for visual robots
A technology of map update and control method, which can be applied to instruments, computer parts, computing and other directions, and can solve the problems of increasing the computational load of machines, reducing the working efficiency of robots, and low learning ability of robots.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The technical solutions in the embodiments of the present invention will be described in detail below with reference to the drawings in the embodiments of the present invention.
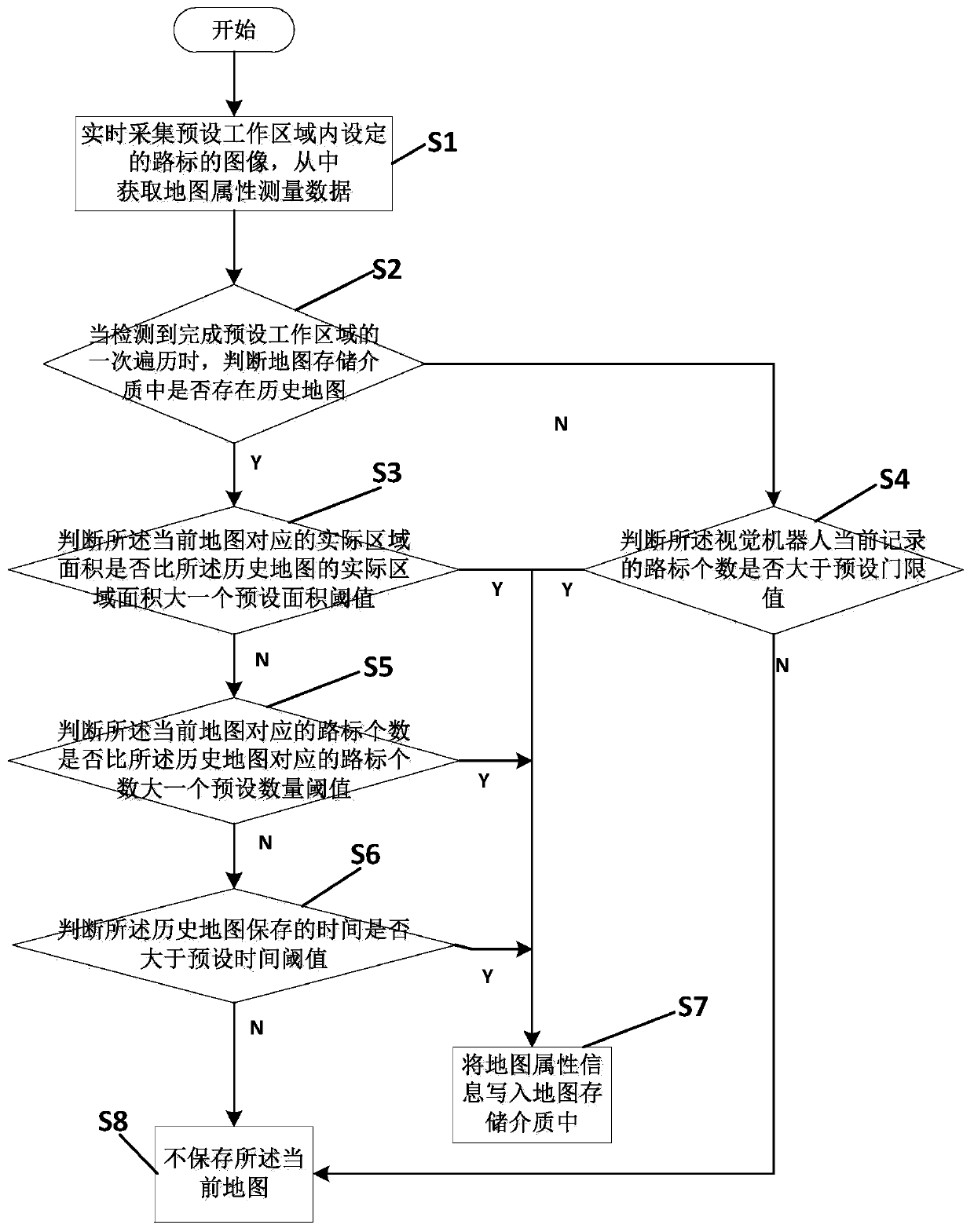
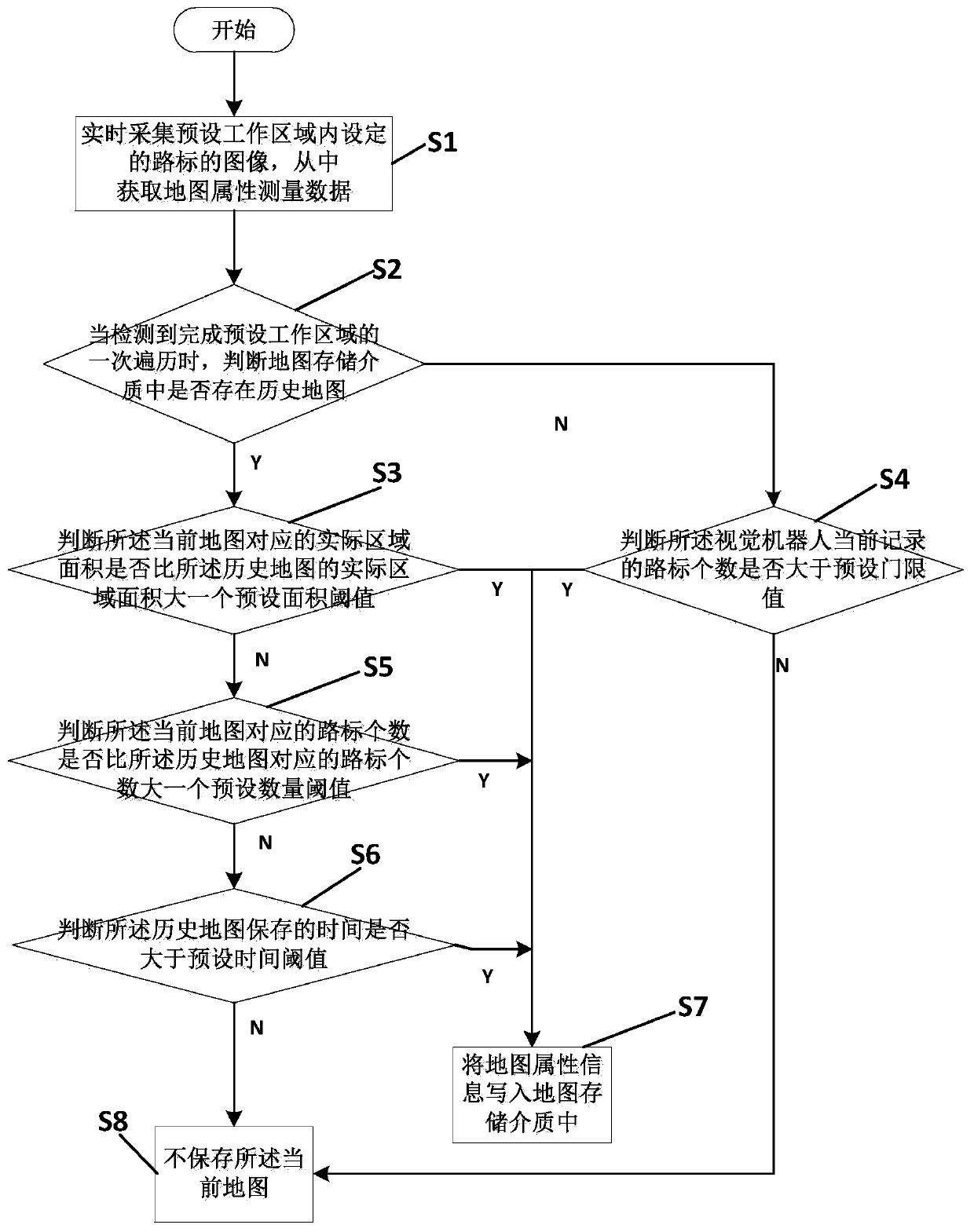
[0018]An embodiment of the present invention provides a map update control method for a visual robot. The map update control method is used to control the visual robot to collect images of landmarks set in a preset working area in real time, wherein the image information of the landmarks includes the features of the landmark images. The point information is mainly collected by the image acquisition sensor installed on the body of the vision robot. After processing, the actual distance information between the road sign and the vision robot can be obtained. It should be noted that the road signs are used to describe the artificially set markers in the environment. The map update control method includes the following steps:
[0019] Step 1. Control the visual robot to traverse the preset working...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More