

Multi-ship encounter collision prevention method for dynamic searching intelligent ship
A dynamic search and ship technology, applied in the direction of non-electric variable control, two-dimensional position/channel control, instruments, etc., can solve the problems of poor practicability and achieve the effect of ensuring safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
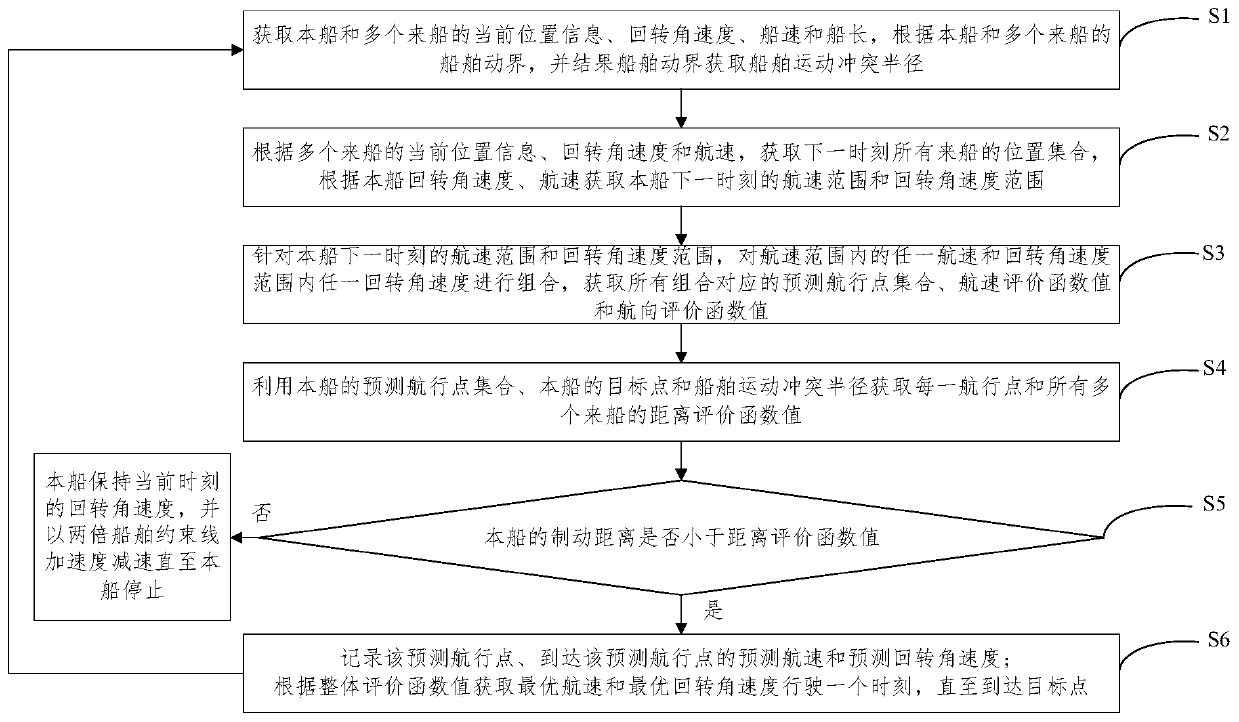
[0063] Such as figure 1 As shown, the present embodiment provides a dynamic search intelligent ship multi-vessel collision avoidance method:
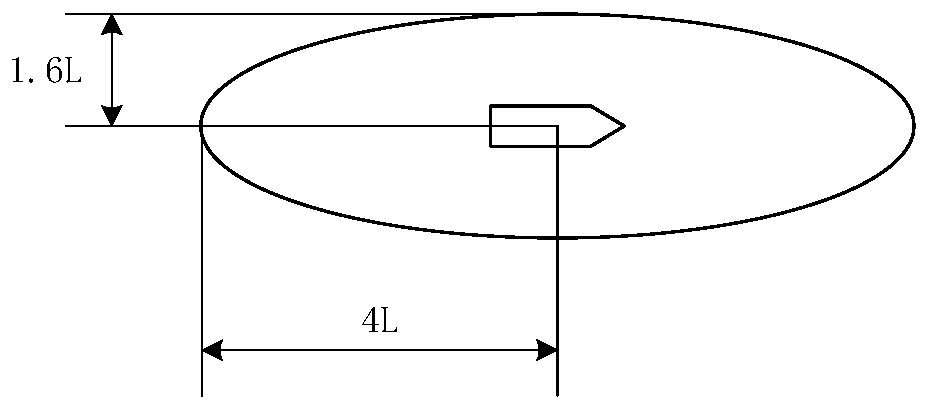
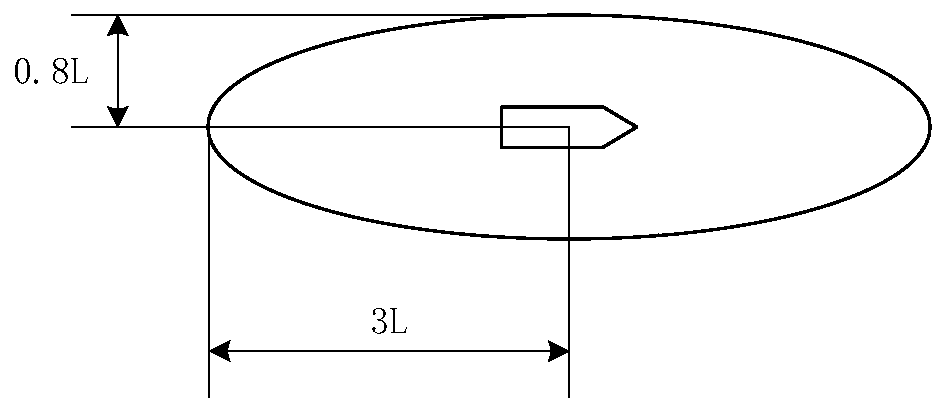
[0064] S1. Obtain the current position information, rotational angular velocity, ship speed and captain of the own ship and multiple incoming ships respectively, determine the ship dynamic circle according to the captains of the own ship and multiple incoming ships, and obtain the ship motion conflict radius R according to the ship dynamic circle ;
[0065] Specifically, for example, smart ships are equipped with sensors such as GPS, AIS, and radar. With the help of sensors loaded on smart ships, the current position information, rotational angular velocity, ship speed and captain of the ship and the incoming ship are obtained. It needs to be calculated, and the conflict radius of the ship motion is actually the distance between the two ships when the ship motion boundary of the own ship and the incoming ship is tangent; in this embodi...
Embodiment 2
[0109] On the basis of Embodiment 1, it also includes between steps S2 and S3:
[0110] Determine the encounter situation between the own ship and all the incoming ships, calculate the collision risk between the own ship and all the incoming ships, and obtain key avoiding ships according to the collision risk.
[0111] Correspondingly, in step S6 also includes:
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More