

Scene analysis method based on binocular vision, robot and storage device
An analysis method and binocular vision technology, applied in the field of visual recognition in the robot industry, can solve the problems of consuming computing resources, complicated calculations, cumbersome use, etc., and achieve the effects of simplified data calculations, accurate output results, and simplified operations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
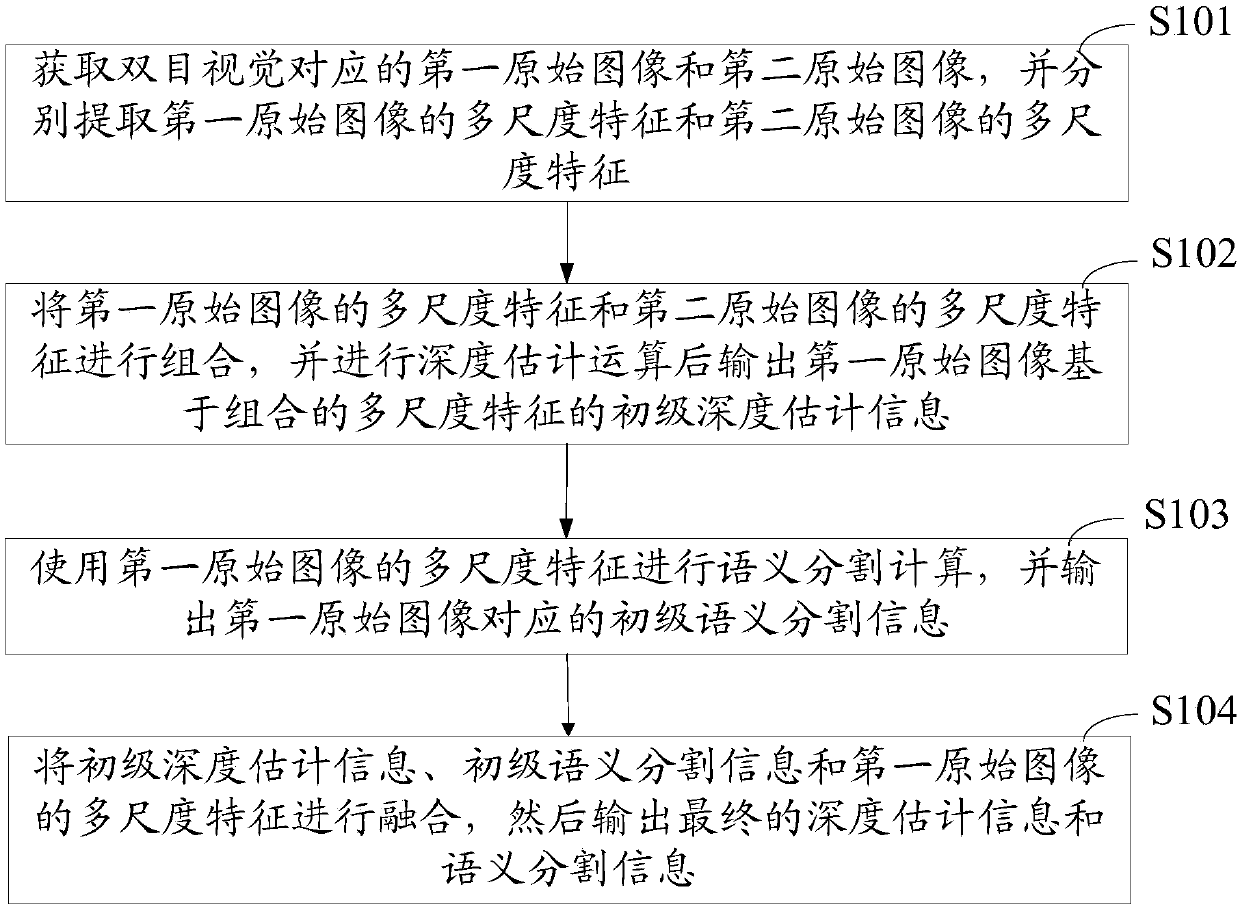
[0022] see figure 1 , figure 1 It is a flowchart of an embodiment of the scene analysis method based on binocular vision in this application. It should be noted that if there are substantially the same results, the method of the present invention does not figure 1 The flow sequence shown is limited. Such as figure 1 As shown, the method includes the following steps:
[0023] S101: Acquire a first original image and a second original image corresponding to binocular vision, and respectively extract multi-scale features of the first original image and multi-scale features of the second original image.
[0024] Among them, binocular vision is a method of simulating the principle of human vision, based on the principle of parallax and using imaging equipment to obtain two images of the measured object from different positions, and by calculating the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More