

Binocular distance measurement method and system
A binocular ranging and binocular camera technology, applied in the field of computer vision, can solve the problems of high equipment requirements, inability to ensure consistent focal length of zoom cameras, and high threshold for the use of binocular ranging technology
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 3 example
[0094] According to the third embodiment provided by the present invention, a binocular ranging method, on the basis of the second embodiment above, step S250 is based on the corner point information of the first polygon and the second polygon , calculating the scaling factor between the first checkerboard calibration image and the second checkerboard calibration image specifically includes:
[0095] acquiring the coordinates of each corner point of the first polygon and the second polygon;
[0096] defining that the starting point coordinates of the first polygon and the second polygon are consistent;
[0097] Substituting the coordinates of the corner points of the first polygon and the second polygon into formula (1), solving to obtain b 11 , b 12 , b 13 , b 21 , b 22 , b 23 , b 31 , b 32 , b 33 ;
[0098] put the b 11 , b 12 , b 13 , b 21 , b 22 , b 23 , b 31 , b 32 , b 33 Substitute into formula (2), and solve to obtain the scaling factor;
[0099] ...
no. 6 example
[0150] According to the sixth embodiment provided by the present invention, a binocular ranging method includes:
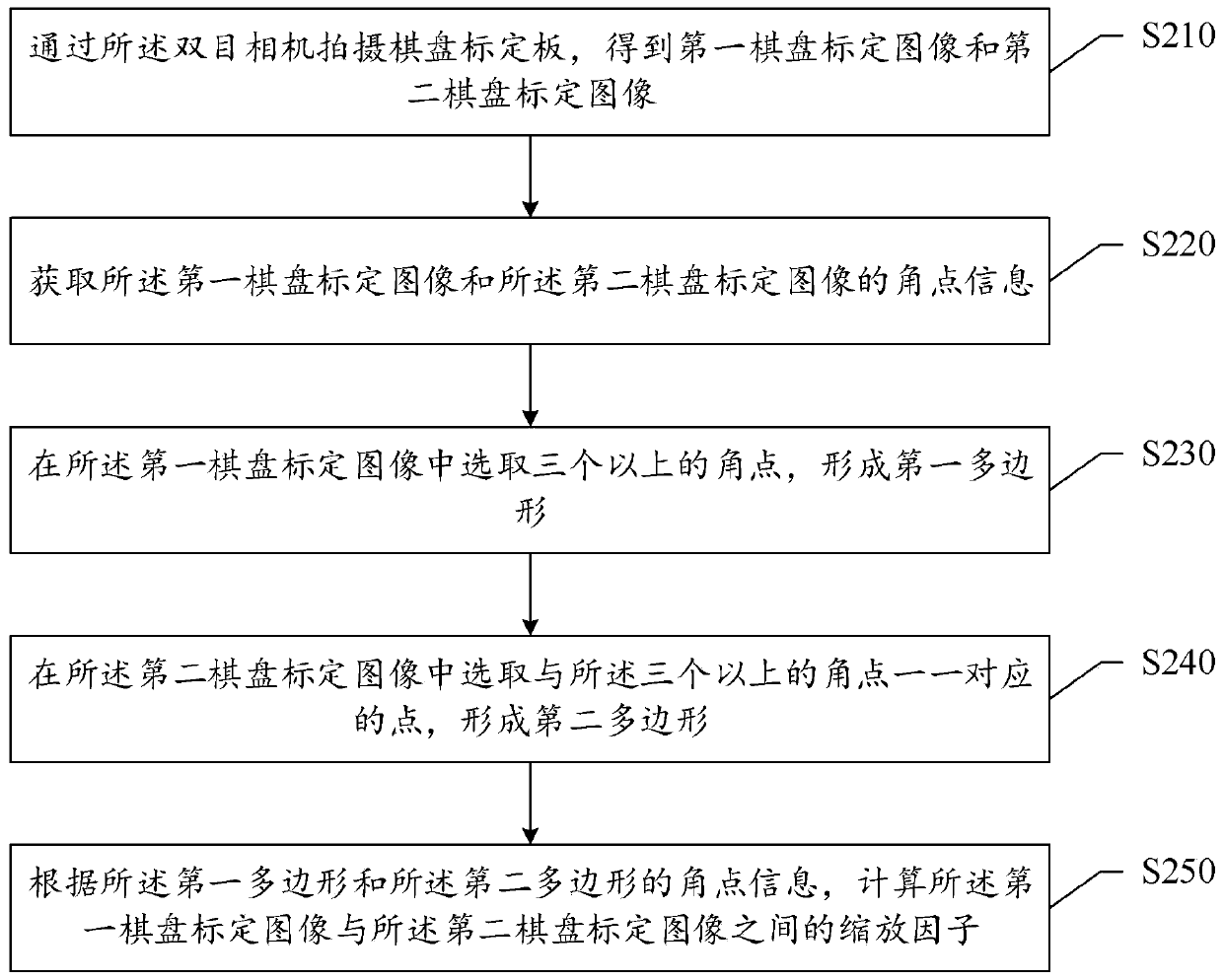
[0151] S301 Use the binocular camera to photograph the checkerboard calibration board to obtain a first checkerboard calibration image and a second checkerboard calibration image;
[0152] Specifically, this step is required to correspond to the positions of the left and right cameras, and it must be ensured that the imaging planes of the two cameras remain approximately on the same horizontal plane.
[0153] During the image acquisition process of the checkerboard calibration, the checkerboard calibration plate should be kept parallel to the camera imaging plane as much as possible, but it needs to constantly move its position or rotate around the z-axis to ensure that there are enough different fields of view. This point is the focus of this study. It is a crucial step in improving the algorithm. If the checkerboard calibration plate and the imaging plane cannot...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More