Quick assembling and disassembling type hoisting and installation track robot and walking device thereof, and assembling and disassembling method
A technology for hoisting a track and a walking device, applied in the field of inspection robots, can solve the problems of complex structure of inspection robots, high inspection robot height, and increase the cost of inspection systems, and achieve the adaptation range of the track path and the improvement of capacity and structure. Compact layout and compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] It should be noted that, in the case of no conflict, the embodiments of the present invention and the features in the embodiments can be combined with each other.
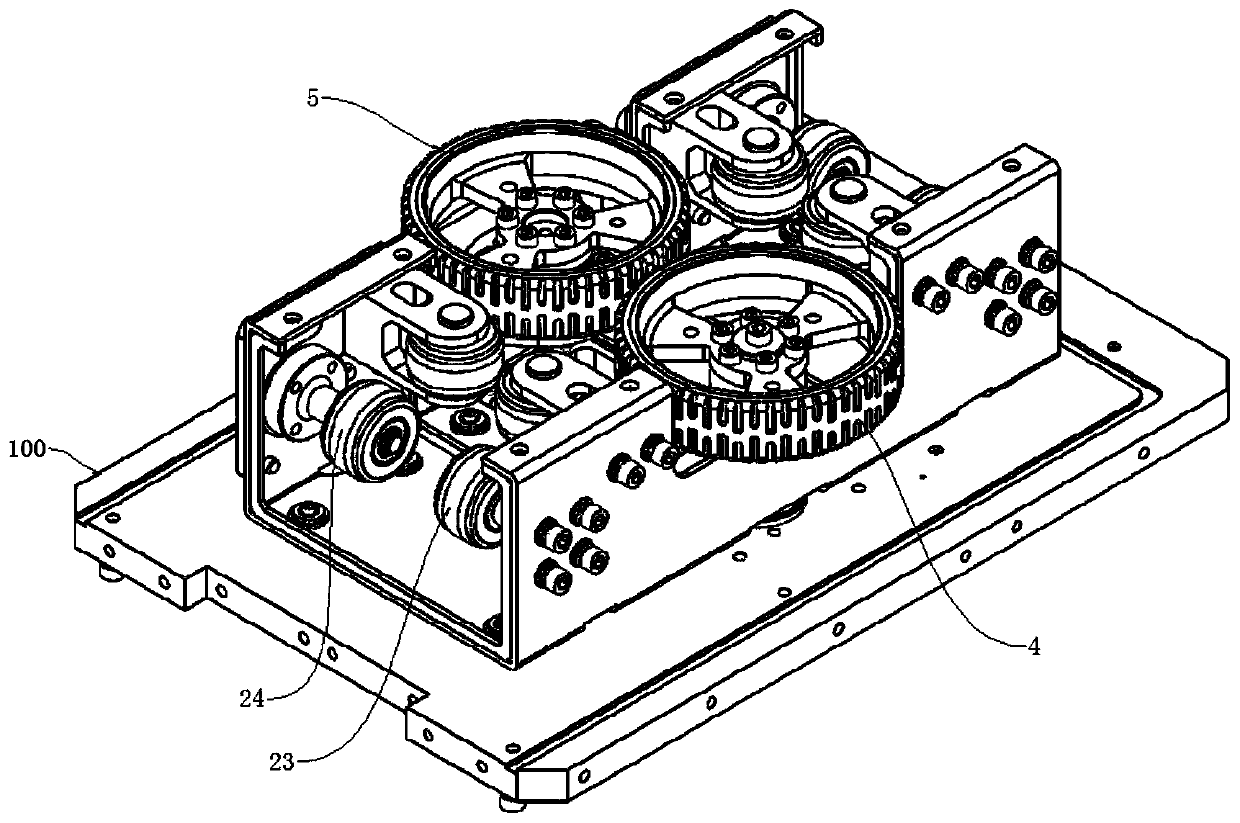
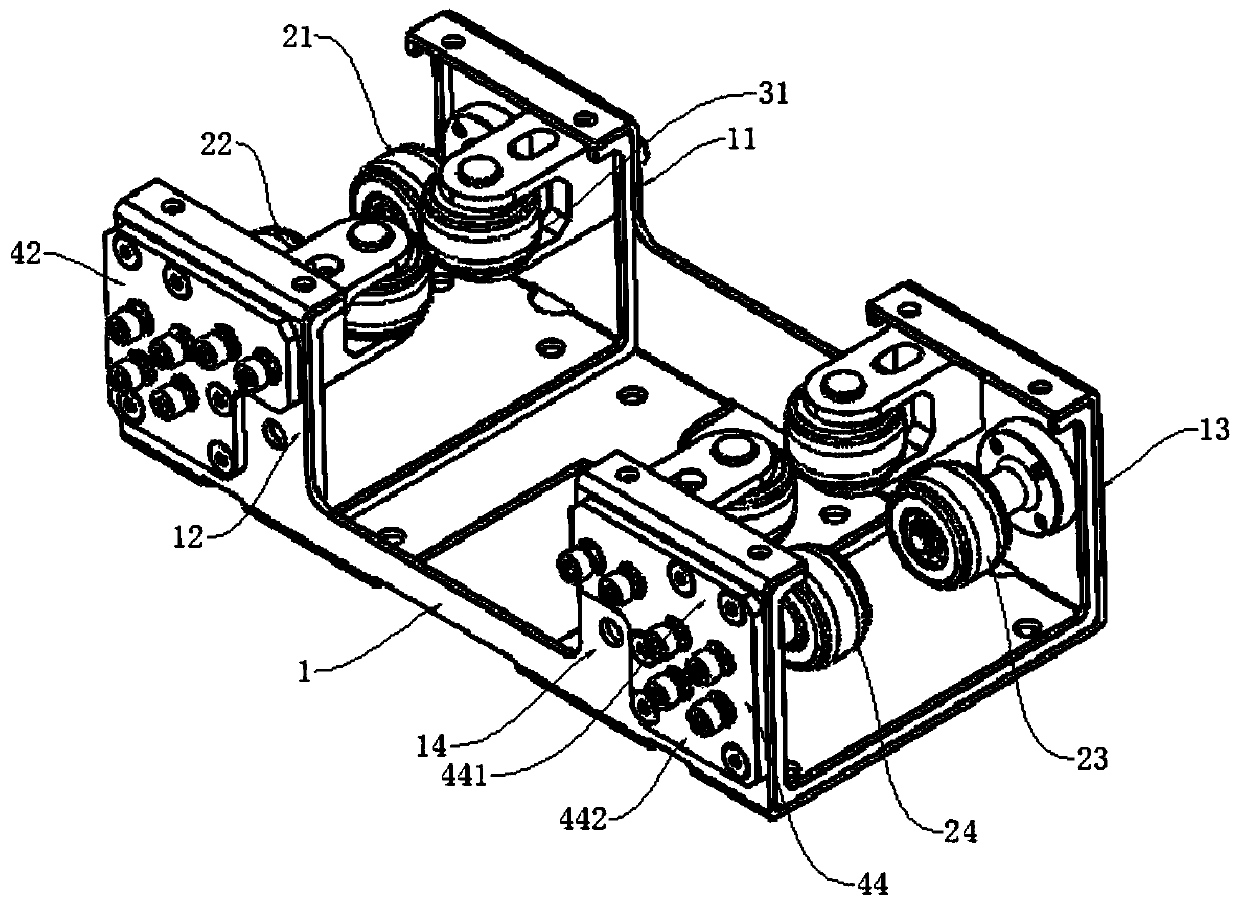
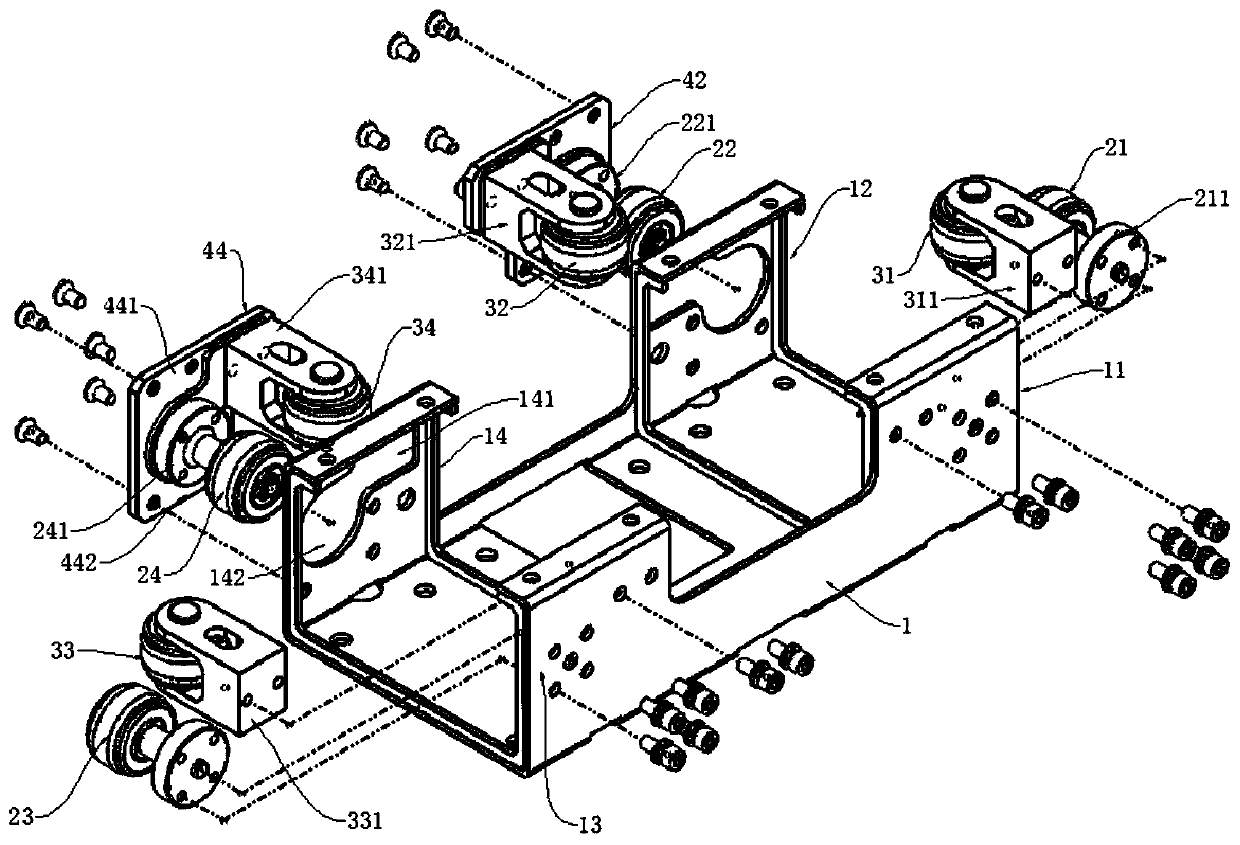
[0036] In the description of the present invention, it should be understood that "front and back direction" and "longitudinal direction" are the driving direction of the robot, that is, the extending direction of the track, "left and right direction" is perpendicular to the driving direction of the robot, and "left and right direction" is also The "horizontal" and "up and down directions" of the robot are the up and down of the conventional concept; in addition, the hoisting track used by the hoisting track robot of the present invention is an "I-shaped" track, referred to as an I-shaped track, including the upper and lower beams on the track and the connection For the track vertical beam of two beams, "inside" refers to the direction close to the track vertical beam, and "outside" refers to the direction awa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com