Autonomous inspection and DTRF identification and control robot for unattended relay protection room
A protection room and robot technology, applied in the direction of manipulators, manufacturing tools, etc., can solve problems such as poor anti-environmental interference, low sensitivity, low reliability, and deviation of internal component characteristics
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] Further illustrate the present invention below in conjunction with accompanying drawing.
[0027] Referring to the attached picture:
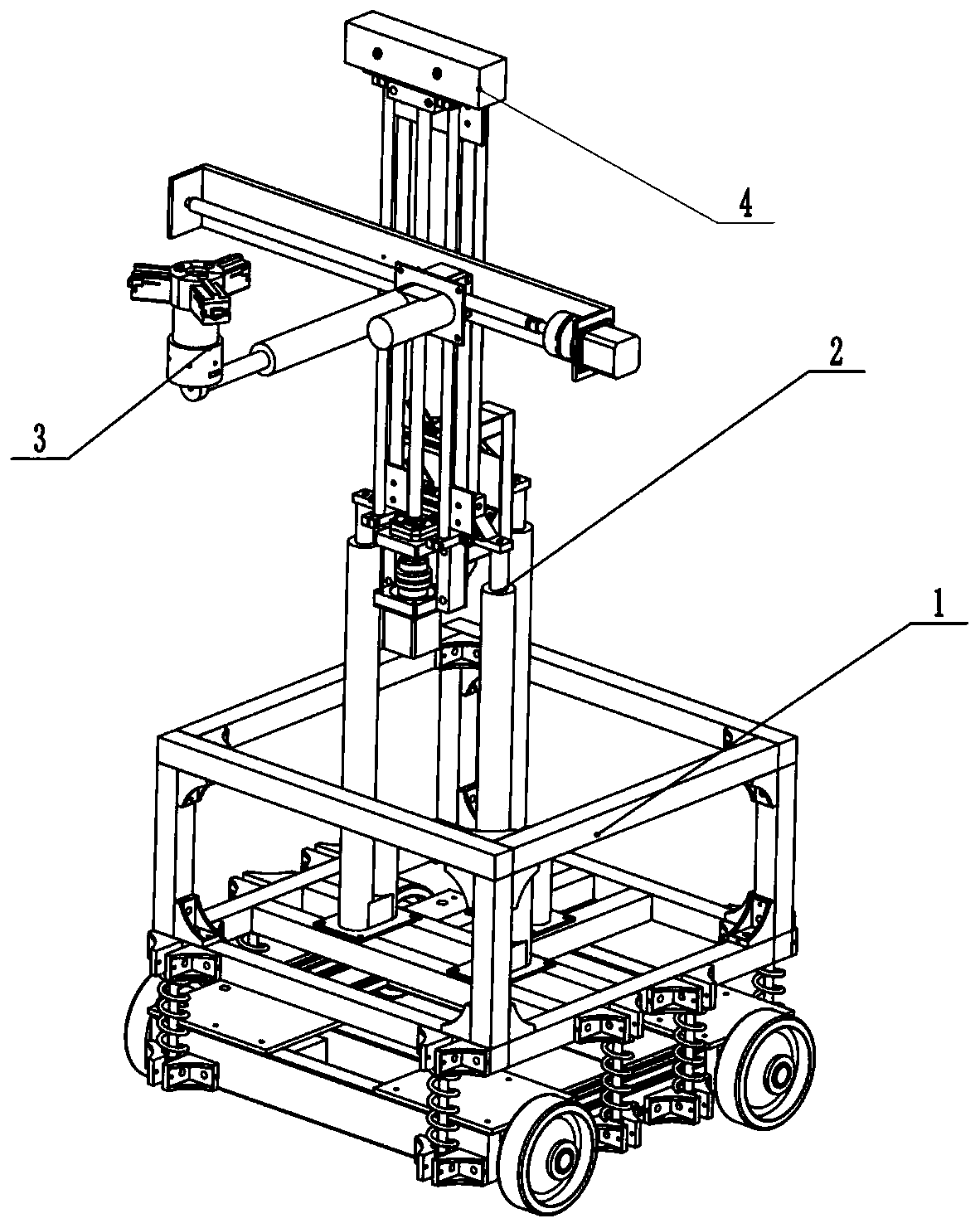
[0028] refer to figure 1 ~Figure, Embodiment 1 The autonomous inspection of unmanned relay protection room and DTRF identification and control robot according to the present invention, including: omnidirectional mobile device 1, two-stage three-axis mobile device 2, three-station multi-functional execution terminal The conversion device 3 and the camera 4, the two-stage three-axis moving device 2 is installed on the omni-directional moving device 1, and the three-station multifunctional execution end conversion device 3 is connected to the free end of the two-stage three-axis moving device 2, the The camera 4 is fixed on the top of the two-stage three-axis moving device 2 .
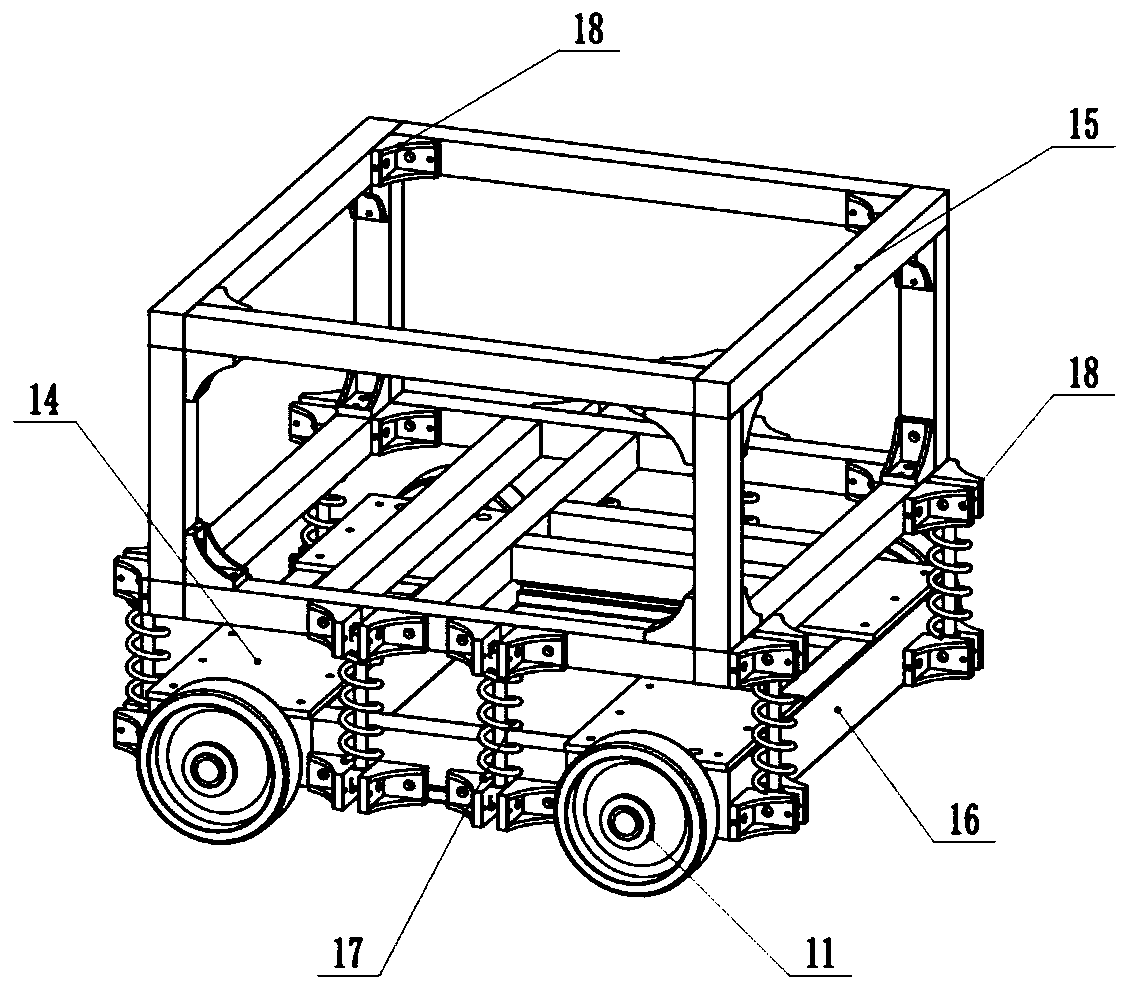
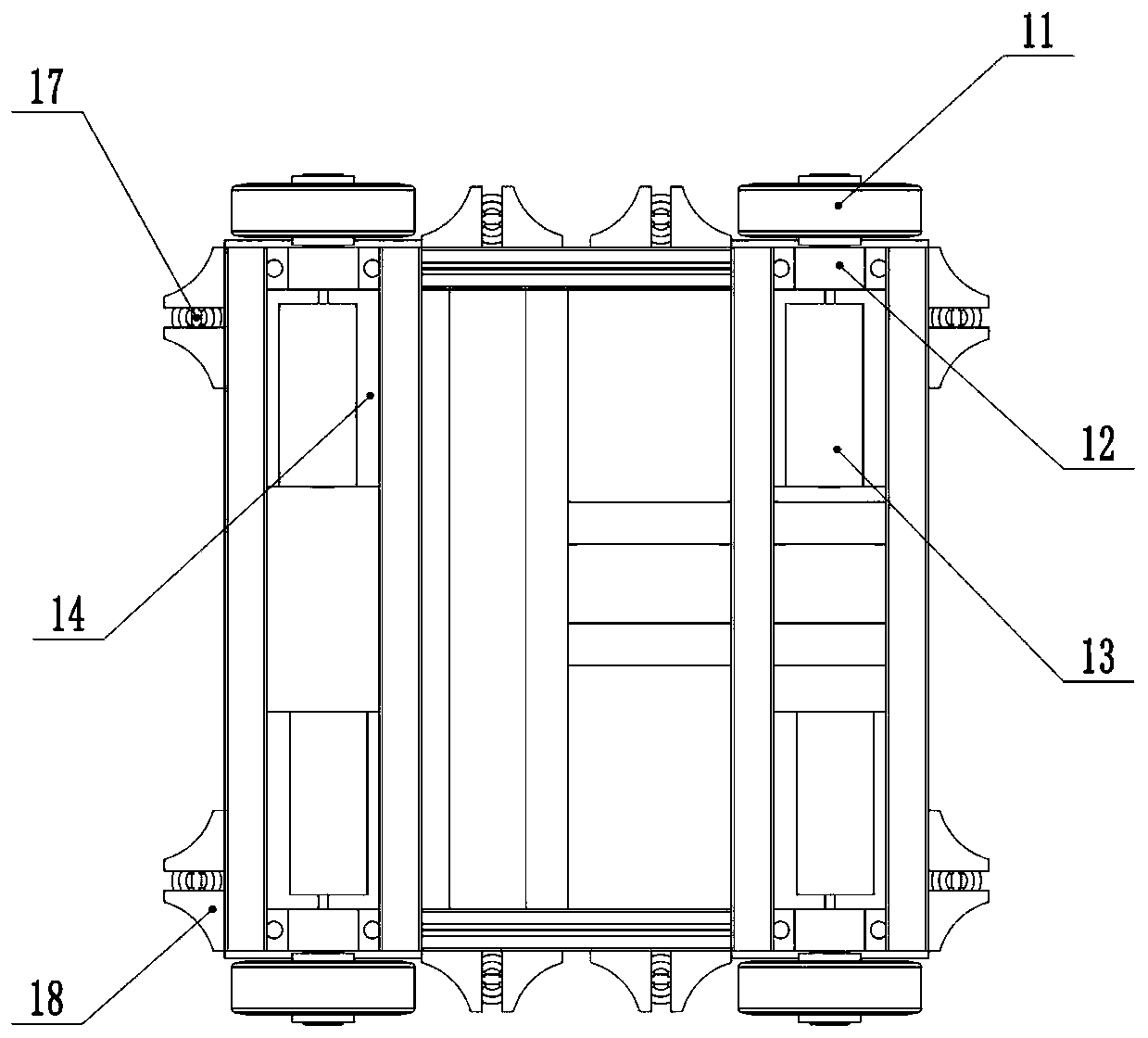
[0029] refer to figure 2 , image 3 , Omni-directional mobile device 1 includes Mecanum wheel 11, bearing support 12, stepping motor 13, iron sheet 14, aluminu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com