

Wall-climbing type robot with effect of two-feet coordinated actuation
A robot and forefoot technology, applied in the field of wall-climbing robots, can solve problems such as complex structures, and achieve the effects of strong adaptability, good application prospects, and strong usability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] In order to deepen the understanding of the present invention, the present invention will be further described below in conjunction with the accompanying drawings and embodiments, which are only used to explain the present invention and do not limit the protection scope of the present invention.
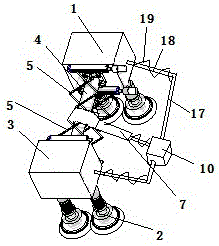
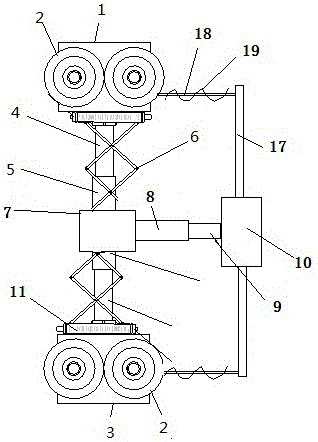
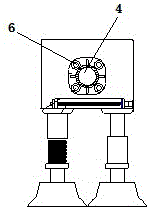
[0023] Such as figure 1 and figure 2 As shown, the wall-climbing robot with coordinated action of two feet includes a front foot 1 and a rear foot 3, a PLC controller, a front foot 1 and a rear foot 3, and two negative pressure parts 12 are respectively connected to the bottom; each negative pressure part 12 , including a negative pressure terminal 2, and a pressure sensor and a distance sensor disposed therein close to the wall. The negative pressure terminal 2 is connected to the walking servo motor 16 through a telescopic rod 13, a telescopic sleeve 14 and a coupling 15 to obtain Power, the walking servo motor 16 is located inside the front foot or the rear foot; the tele...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More