Unmanned aerial vehicle remote sensing networking method and device based on three-level architecture and architecture
An unmanned aerial vehicle and aircraft remote sensing technology, which is applied in the field of unmanned aerial vehicles, can solve the problems of inability to meet the needs of real-time rapid, ultra-high-resolution remote sensing observation, scattered distribution, and restriction of the power performance of unmanned aerial vehicles.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The present invention will be described in detail below with reference to the accompanying drawings and examples. It should be noted that, in the case of no conflict, the embodiments in the present application and the features in the embodiments can be combined with each other.
[0041] Aiming at the defects of the current UAV remote sensing networking, the present invention is oriented to monitoring tasks, especially the normalized ecological environment observation, flood disaster and homeland security emergency observation requirements, and proposes a national UAV remote sensing networking based on a three-level architecture method to realize high-frequency and rapid observation of UAVs and provide support for decision-making departments.
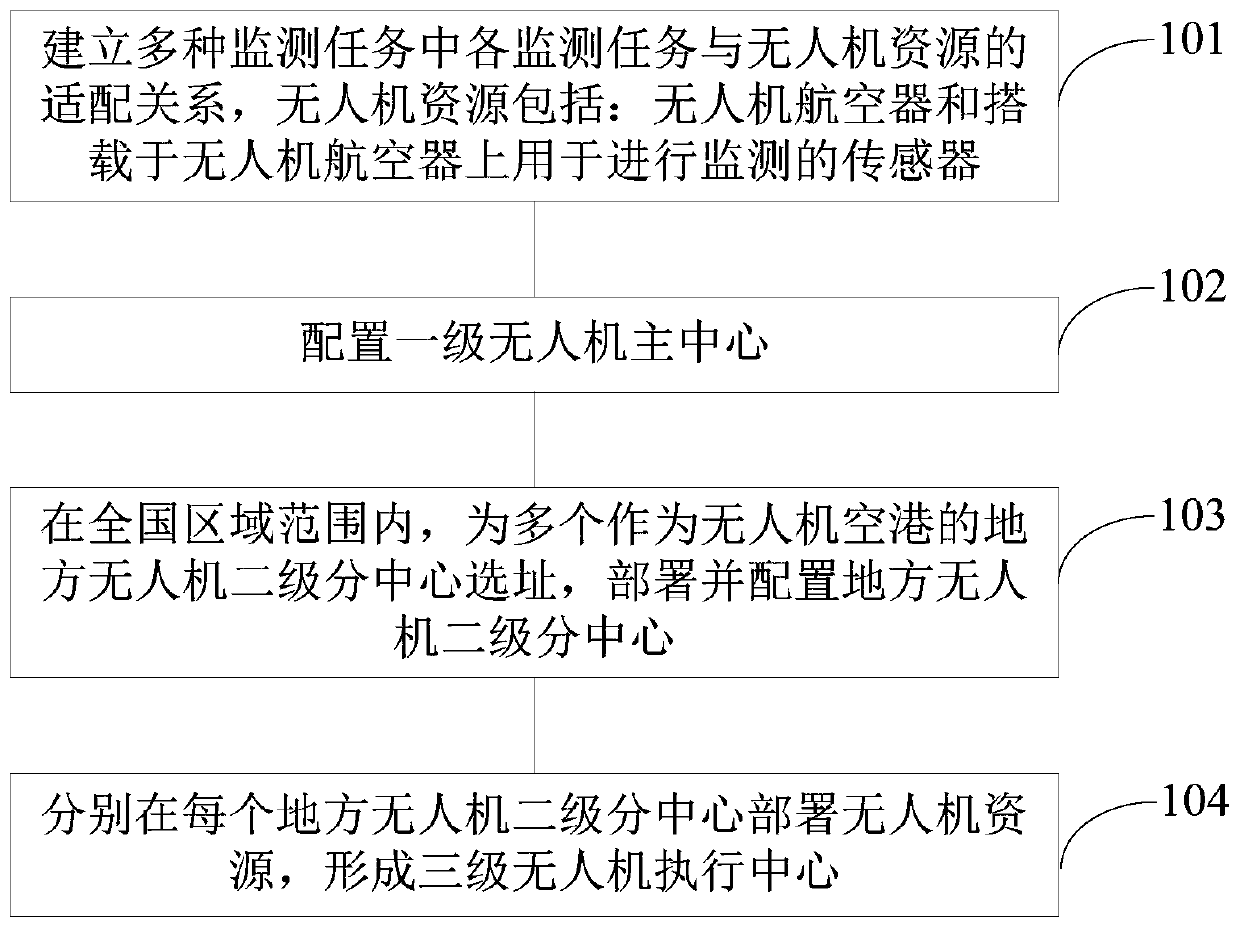
[0042] see figure 1 , an embodiment of the present invention provides a method for networking of unmanned aerial vehicles based on a three-level architecture, which includes the following steps:
[0043] Step S101 , establishing...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More