

Magnetic-drive peristaltic soft-body robot based on magnetic programming temperature-sensitive hydrogel
A temperature-sensitive hydrogel, magnetic drive technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of complex mechanical structure and large control deviation, and achieve the effect of good narrow space environment, stable deformation effect and convenient control.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The present invention will be further described below with reference to the drawings and specific embodiments, but the protection scope of the present invention is not limited to this.
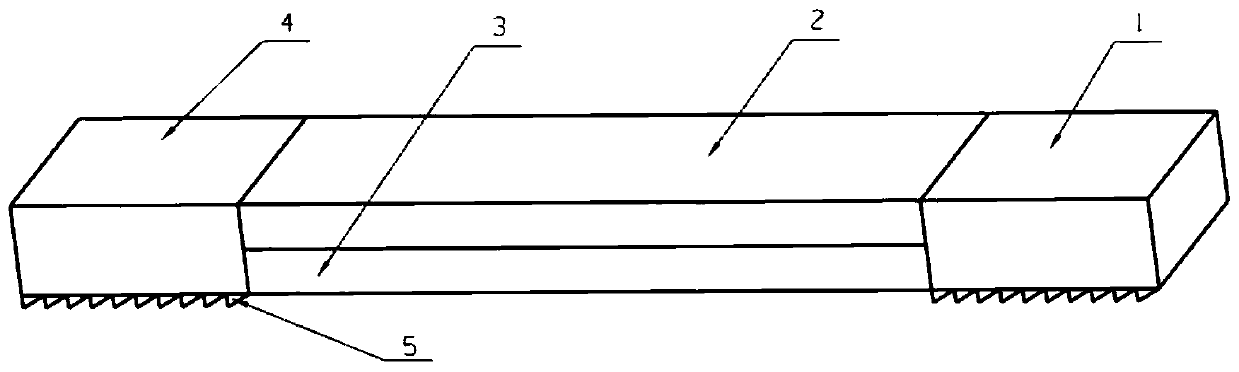
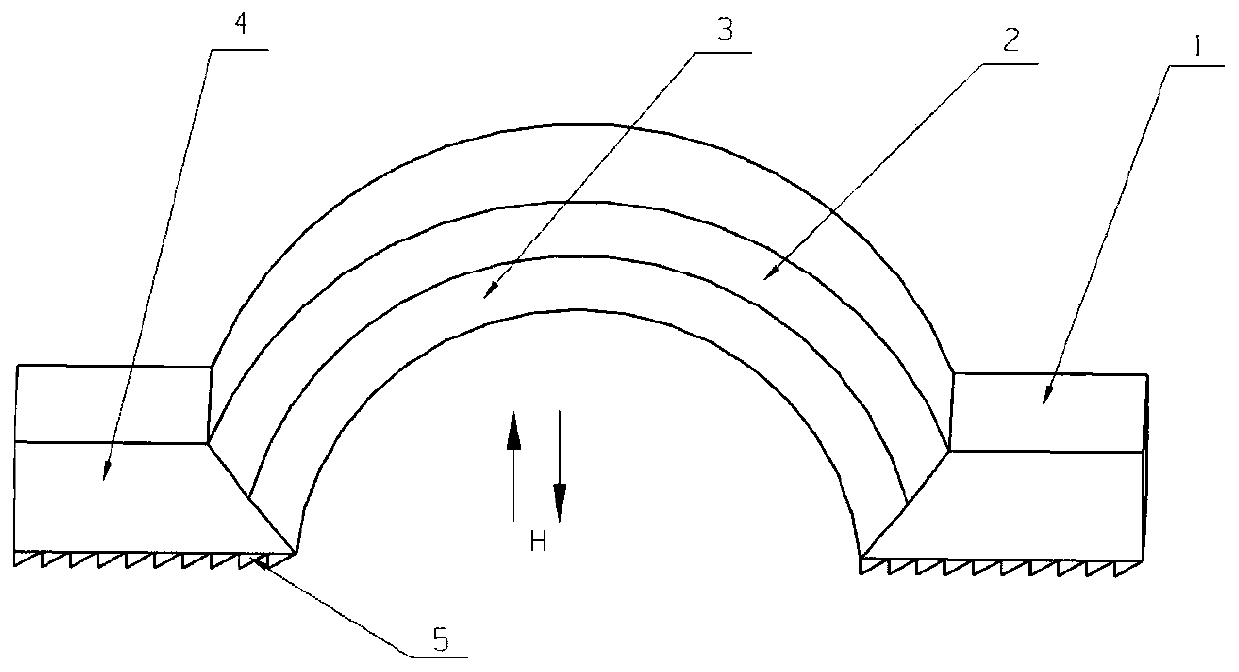
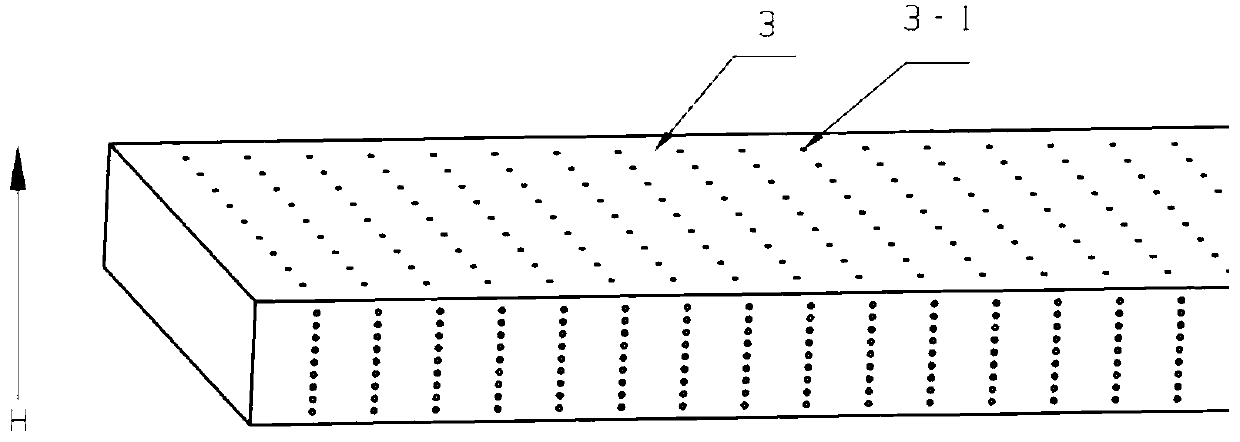
[0035] The magnetically driven peristaltic soft robot based on magnetically programmed temperature-sensitive hydrogel of the present invention includes a first moving body and a second moving body. The two ends of the second moving body are respectively connected to the first moving body, and the second moving body It is a temperature-responsive hydrogel containing magnetic particles; the second moving body is deformed by applying an alternating magnetic field to the second moving body. The second moving body has an upper and lower double-layer structure, the upper layer 2 is a double-network cross-linked hydrogel, and the lower layer 3 is a temperature-responsive hydrogel containing magnetism, and an alternating magnetic field is applied to the second moving body. , So that the deformatio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More