

Dynamic K nearest neighbor map matching method combined with deep network
A map matching and deep network technology, applied in the field of map matching, can solve problems such as inherent errors of user receivers, deviations between GPS positioning points and actual positions, and inability to measure propagation delay errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The present invention will be described in further detail below in conjunction with the accompanying drawings.
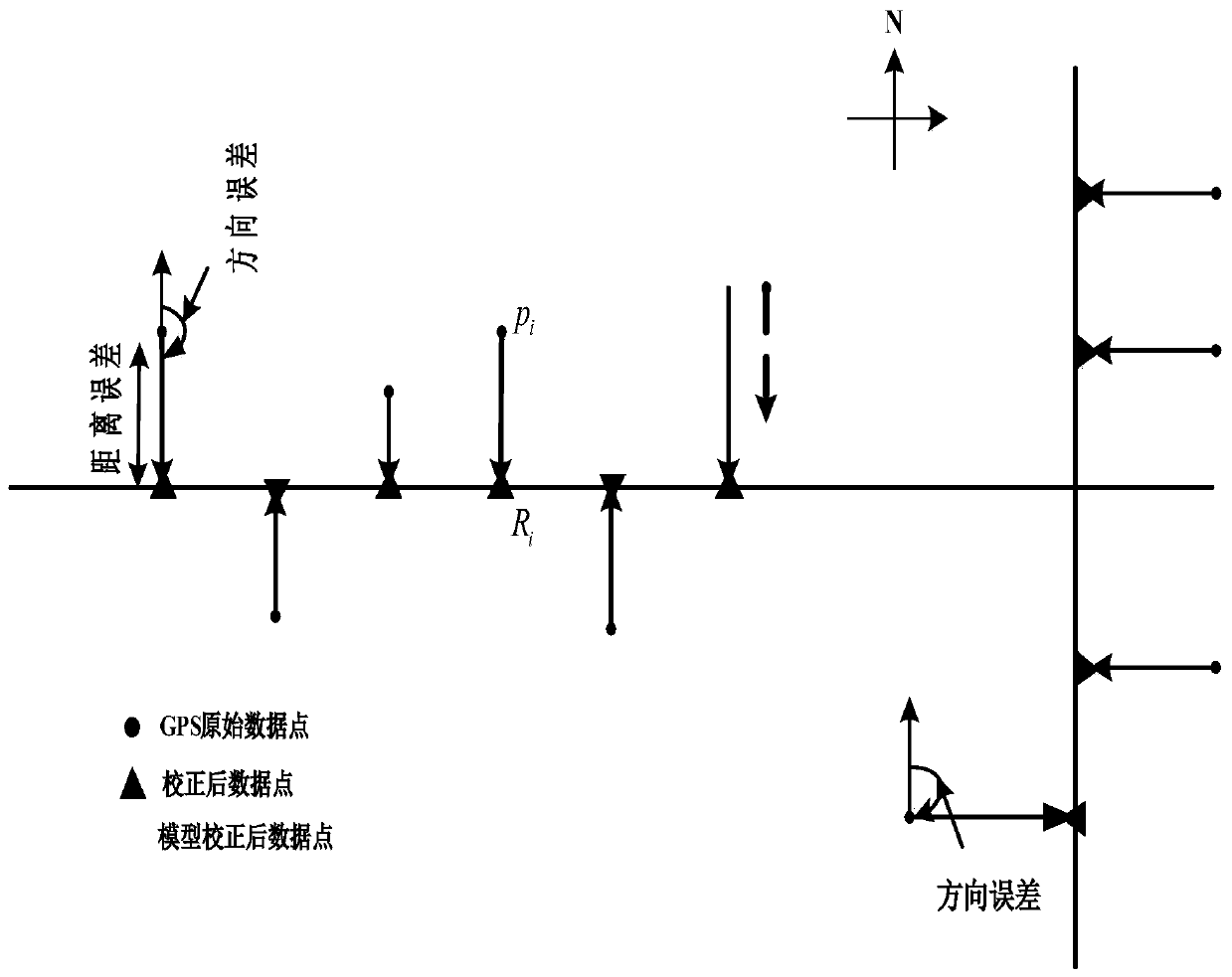
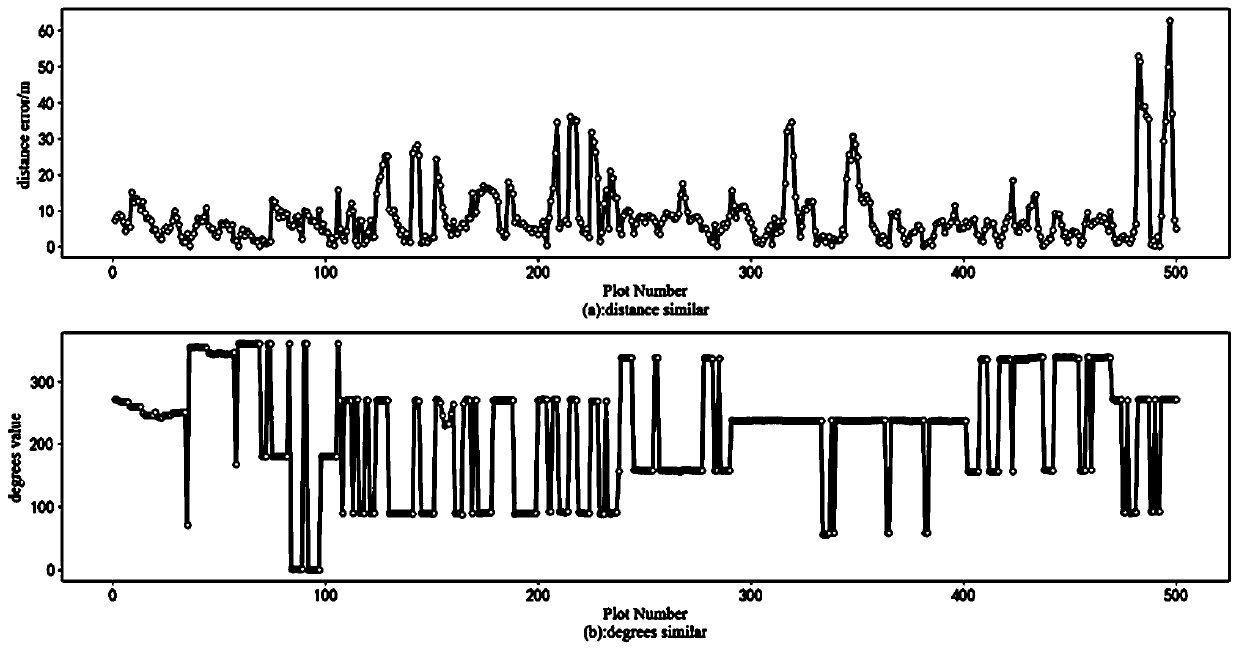
[0048] 1. Define the trajectory sequence as T, T is a series of continuous GPS positioning points p 1 ,p 2 ,...,p n , each anchor point contains longitude (p i .lat), latitude (p i .lon), time (p i .time), speed (p i .velocity), heading angle (p i .path-angle) and other features. 2. Define distance error: Assume R i is the anchor point p i , then the R i with p i distance error Such as figure 1 shown. 3. Define the direction error: Assume R i is the anchor point p i , then the R i ,p i The clockwise angle between the connecting line and the true north direction is called the direction error Such as figure 1shown. 4. Define the error similarity of the adjacent area: GPS positioning point p i with adjacent point p i-n ,...,p i-1 and p i+1 ,...,p m+1 (where m, n∈N * )of and There are similarities between. see figure 2 ,From f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More