

Wheel-like rolling reconnaissance robot
A robot and wheel-like technology, which is applied in the field of wheel-like rolling reconnaissance robots, can solve the problems of non-resettable, small application range, small wheel deformation range, etc., and achieve easy manufacturing and engineering realization, simple mechanism structure, and low cost Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] Below, the present invention will be further described in conjunction with the accompanying drawings and specific implementation methods. It should be noted that, under the premise of not conflicting, the various embodiments described below or the technical features can be combined arbitrarily to form new embodiments. .
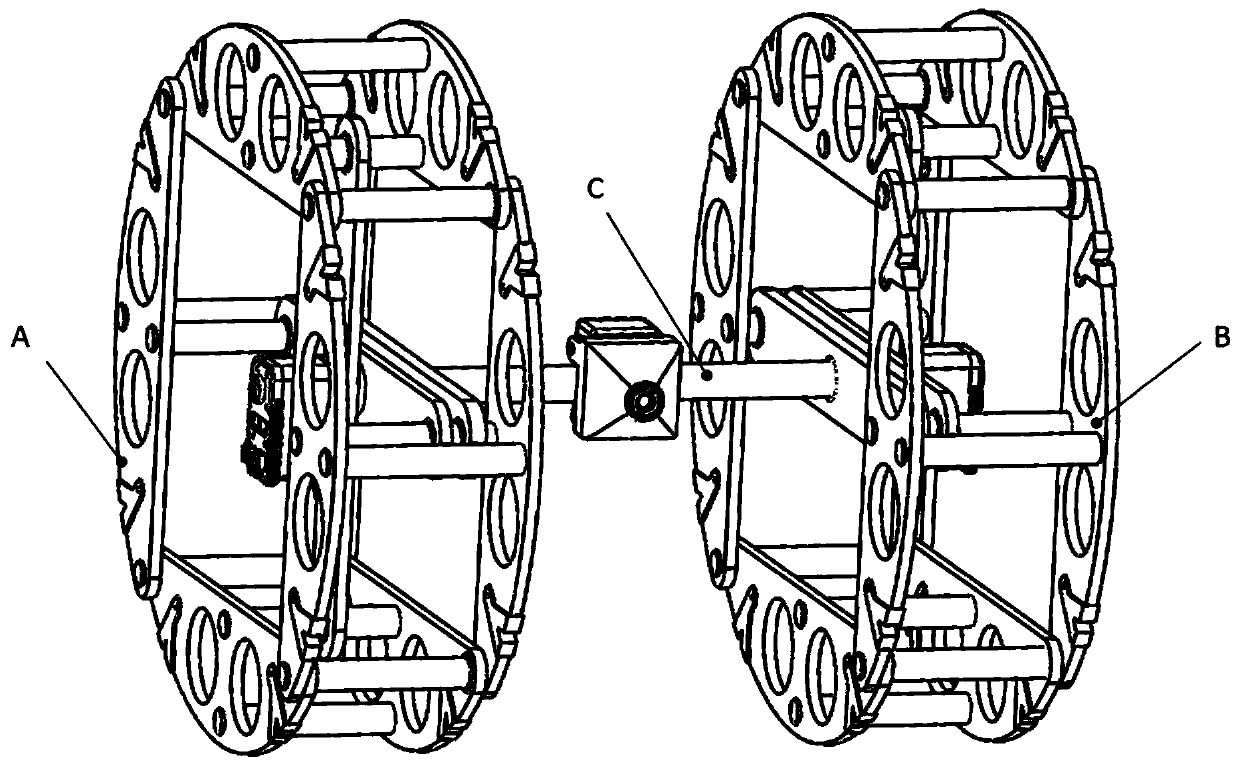
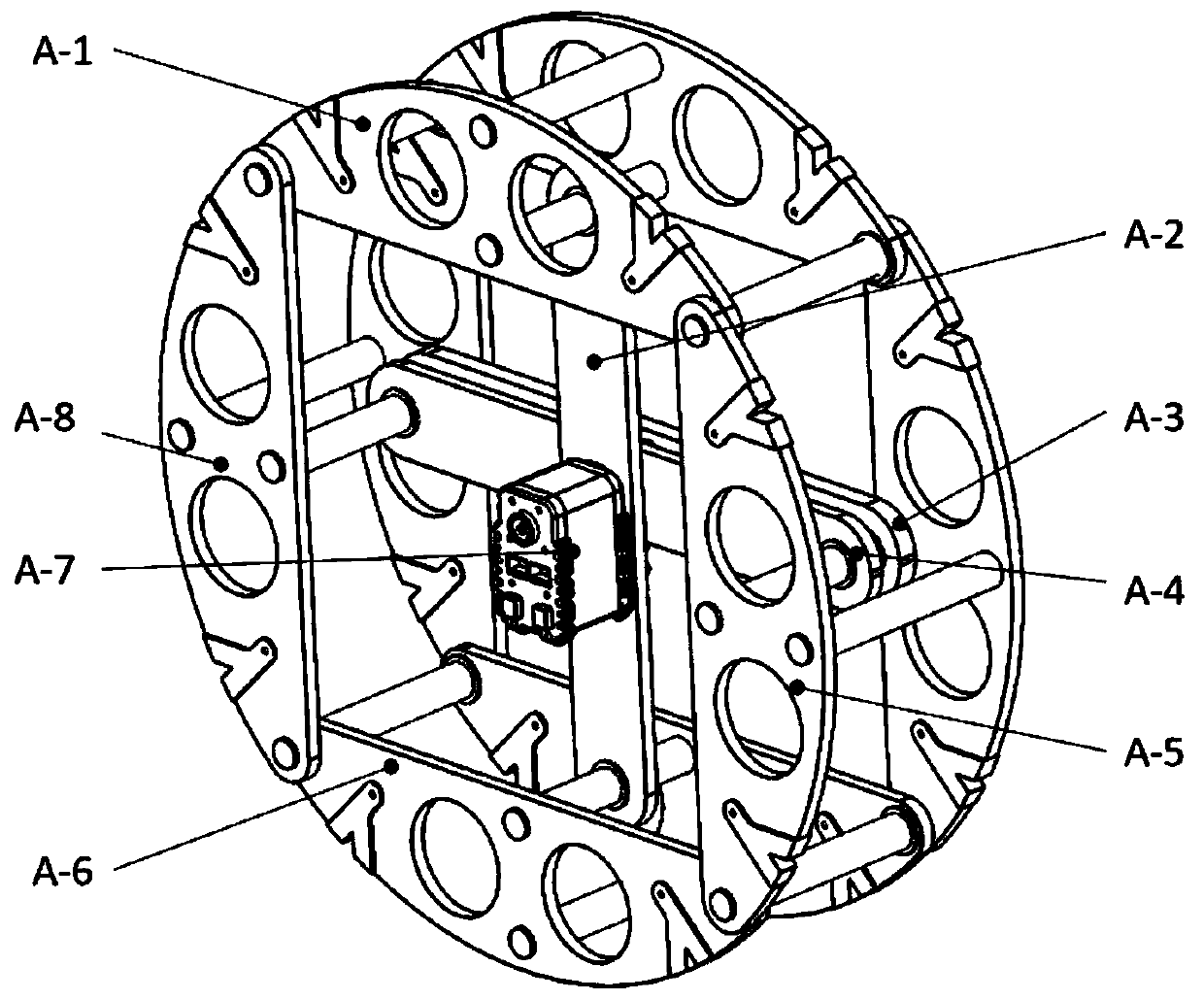
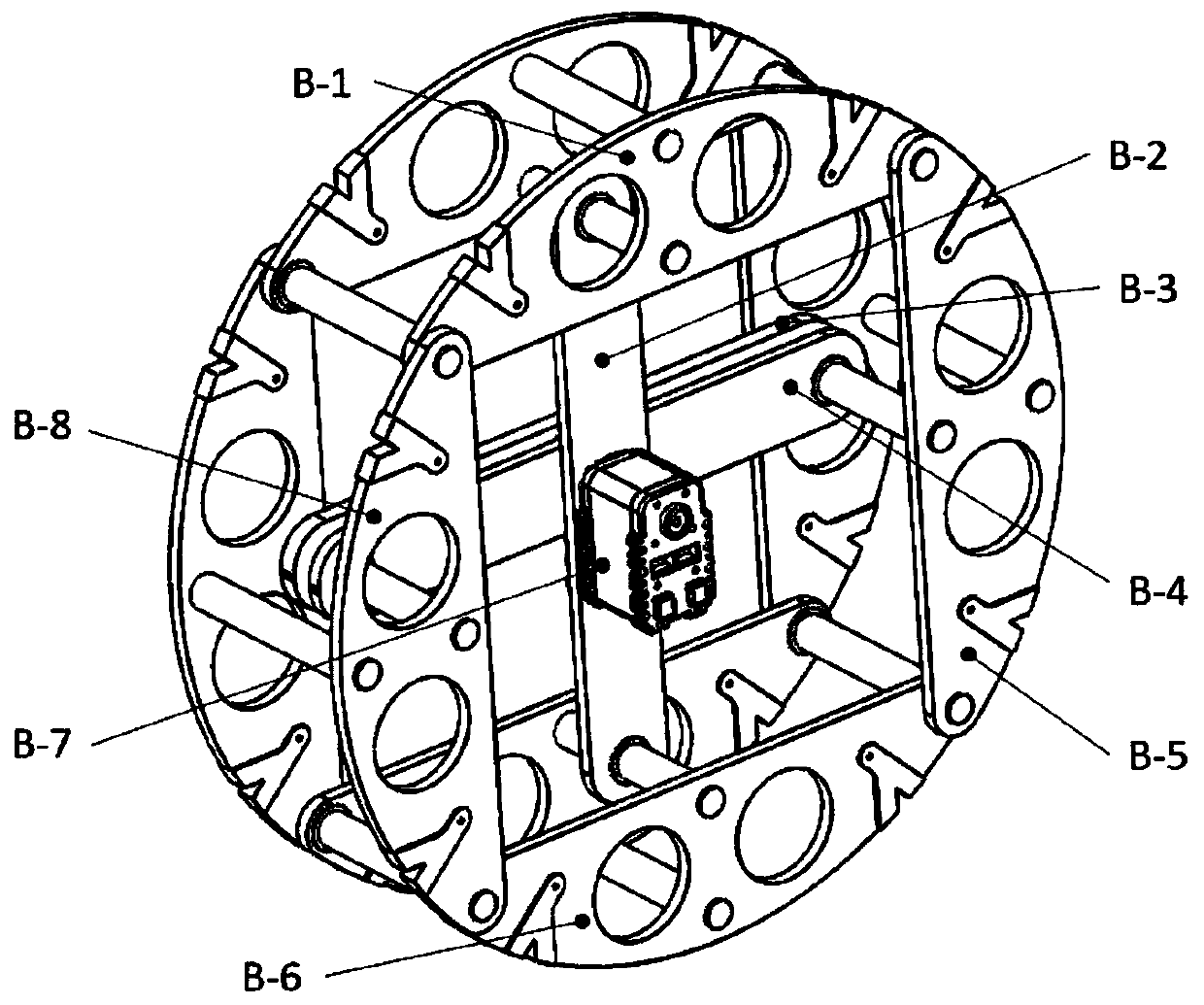
[0045] A type of wheeled rolling reconnaissance robot such as figure 1 As shown, the left wheel mechanism (A) and the right wheel mechanism (B) are connected in parallel and symmetrically through the pan / tilt (C), as shown in the attached figure 2 The left wheel mechanism (A) is formally made up of four arcuate plates.
[0046] see figure 2 As shown, the left wheel mechanism (A) includes the first arched plate (A-1) of the left wheel mechanism, the steering gear plate (A-2) of the left wheel mechanism, the connecting plate (A-3) of the left wheel mechanism, and the steering plate (A-4) of the left wheel mechanism ), the second arched plate of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More