

3D Object Pose Parameters Estimation Method and Vision Equipment
A technology for three-dimensional objects and pose parameters, which is applied in computing, image data processing, and image analysis. effect of influence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
[0039] In the following description, use of suffixes such as 'module', 'part' or 'unit' for denoting elements is only for facilitating description of the present invention and has no specific meaning by itself. Therefore, 'module', 'part' or 'unit' may be used in combination.
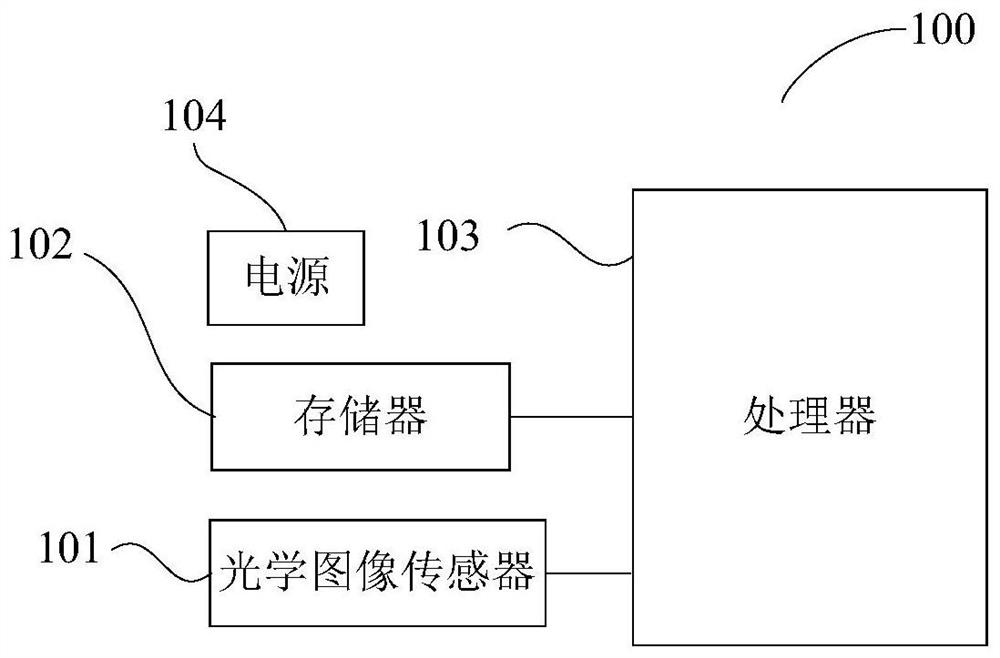
[0040] The vision devices provided in the embodiments of the present invention include but are not limited to industrial automation equipment, intelligent robots and other equipment or user terminals, which can identify and capture target objects, provide real-time image information and real-time spatial pose information of target objects. The visual device provided in the embodiment of the present invention may include: an RF (Radio Frequency, radio frequency) unit, a WiFi module, an audio output unit, an A / V (audio / video) input unit, a sensor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More