

Air-ground integrated electric parallel-connection type wheel-foot driving mechanism
A driving mechanism and parallel technology, applied in the field of robots, can solve problems such as inability to pass, and achieve the effects of strong obstacle crossing ability, fast movement speed and low energy consumption.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The present invention will be described in detail below with reference to the accompanying drawings and examples.
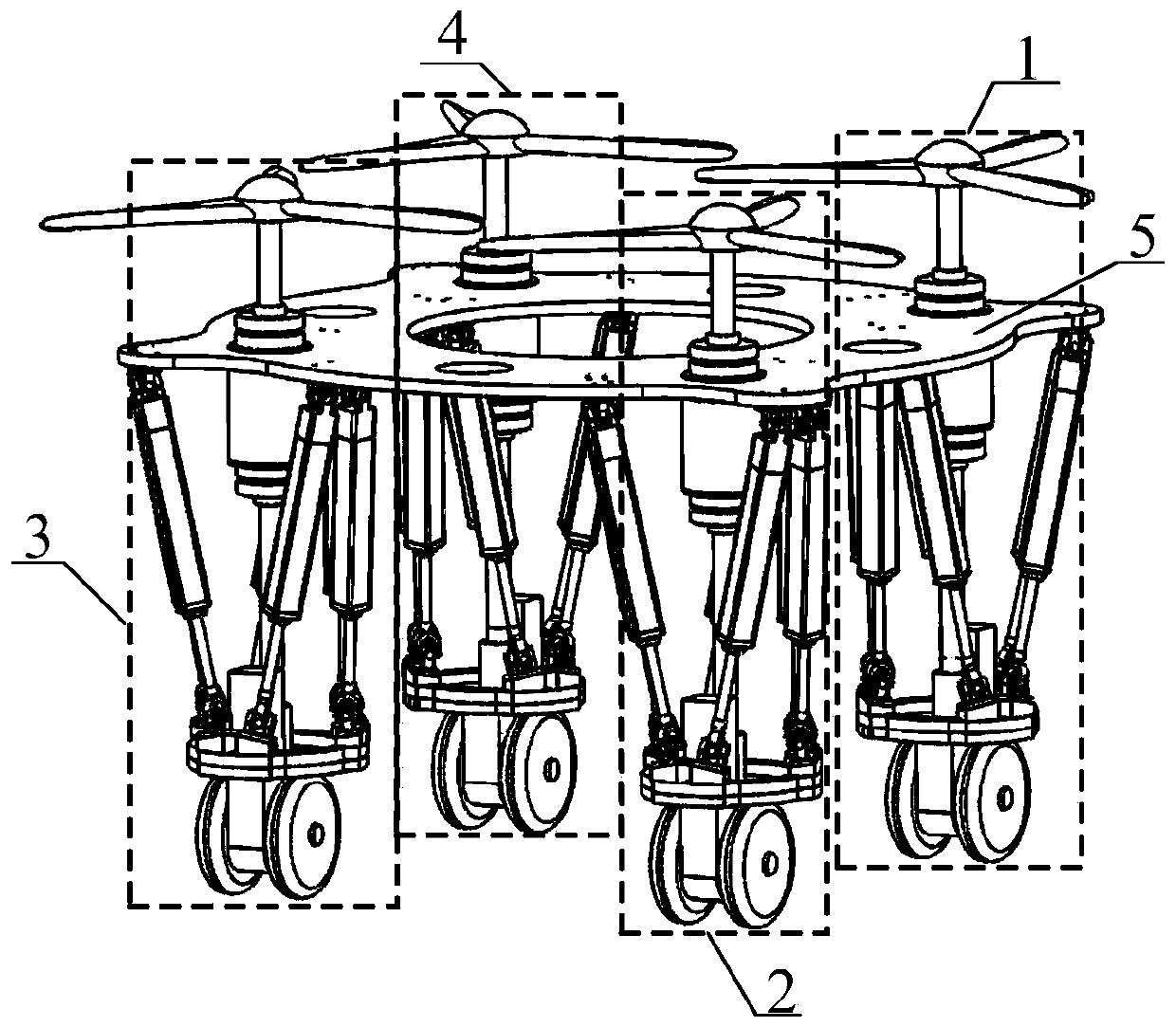
[0019] This embodiment provides an air-ground integrated electric parallel wheel-foot drive mechanism, which has four motion modes: wheel motion, foot motion, wheel-foot compound motion, and flight motion. It can complete flying tasks similar to drones. It can also be used as a land load-driven robot, such as figure 1 As shown, the driving mechanism is composed of four single driving devices: the first single driving device 1, the second single driving device 2, the third single driving device 3 and the fourth single driving device 4 are respectively installed around the fuselage 5, A single drive unit serves as one leg of the robot.
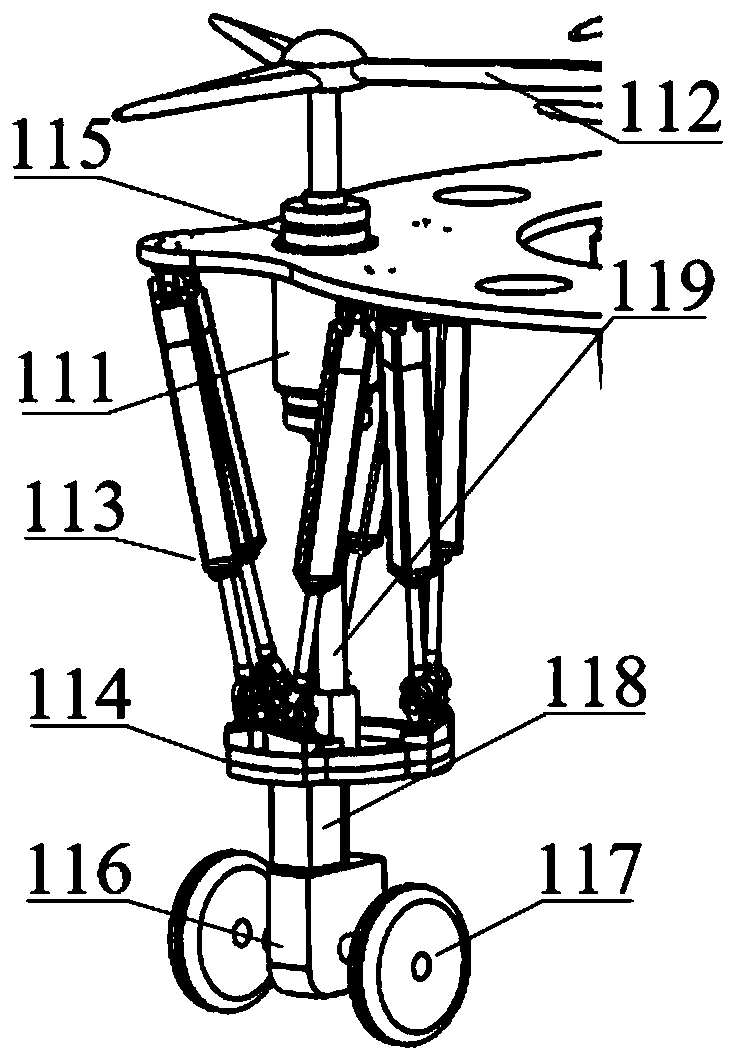
[0020] The first single drive device 1, the second single drive device 2, the third single drive device 3 and the fourth single drive device 4 have the same structure, and the first single drive device 1 is taken as an exam...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More