

Special-purpose vehicle distributed control method and system based on CAN bus
A CAN bus and distributed control technology, applied in the field of CAN bus, can solve the problems of occupying a large amount of controller resources, complex electrical wiring harness, unfavorable maintenance, etc., to reduce ports and electrical connection harnesses, improve work efficiency, and reduce conversion paths. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
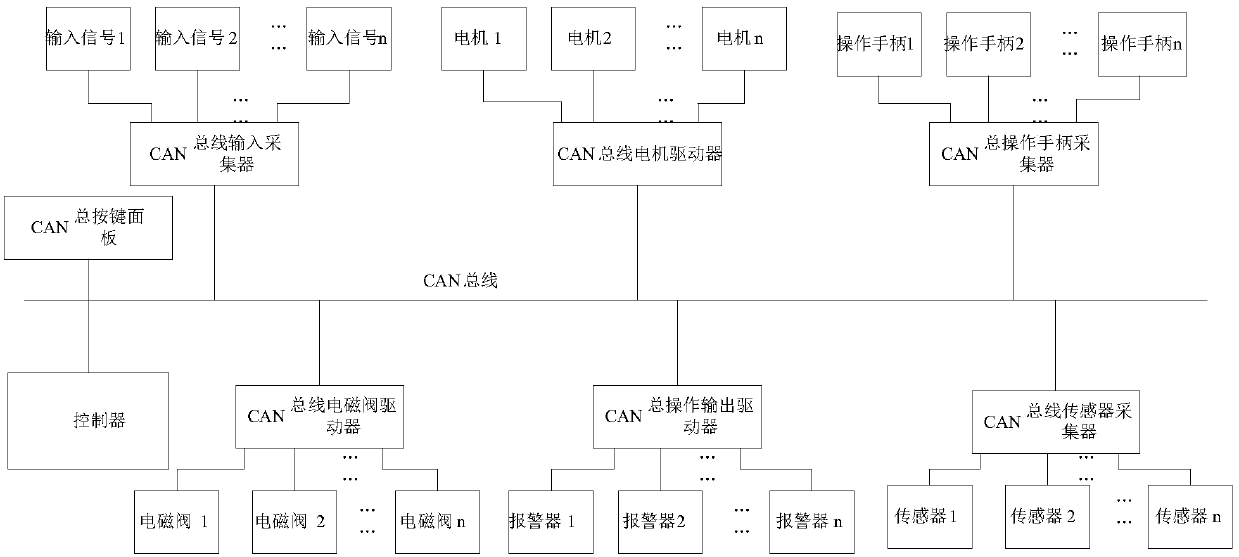
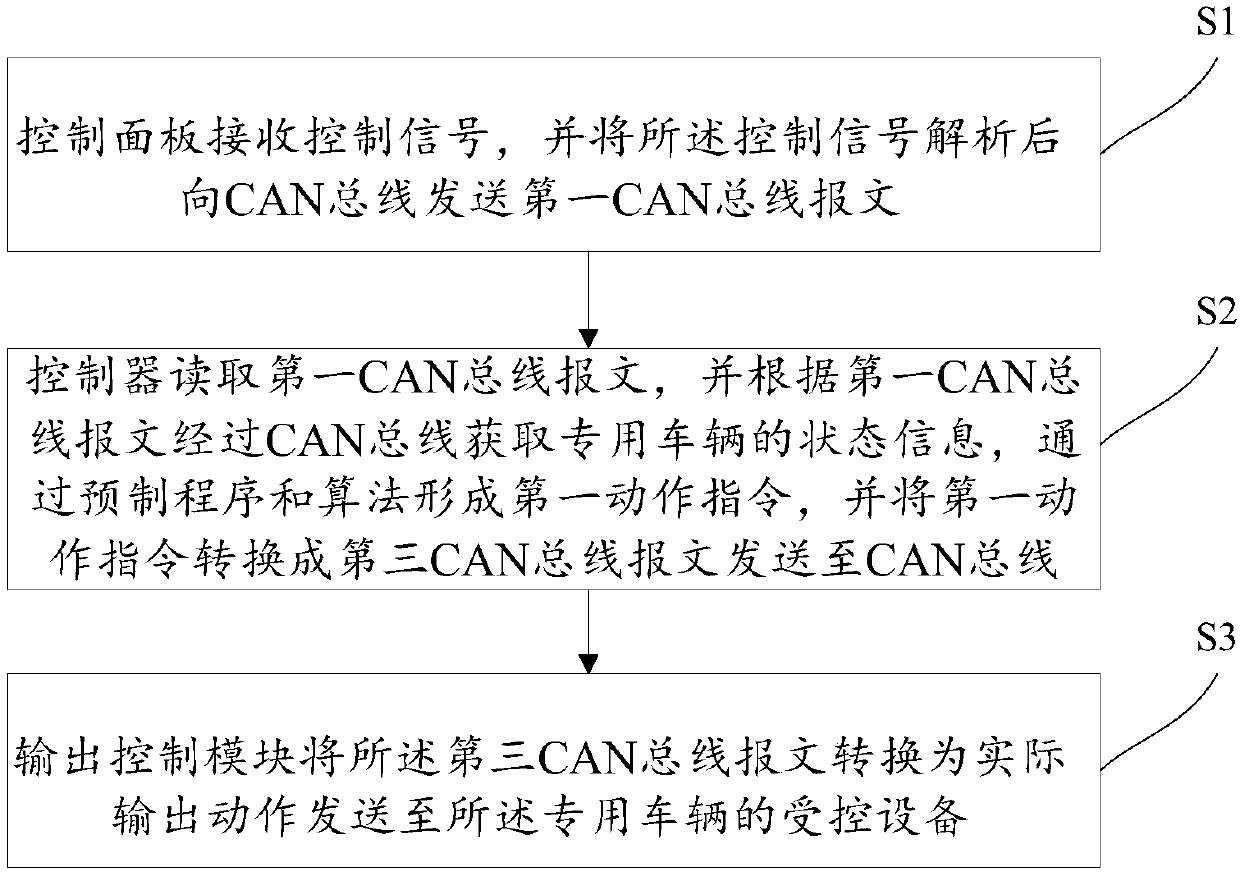
[0029] Please refer to figure 1 , figure 2 , in one embodiment of the present invention, the distributed control method of special vehicle based on CAN bus, comprises the following steps:
[0030] Step S1, the control panel receives the control signal, and sends the first CAN bus message to the CAN bus after analyzing the control signal;
[0031] The control signal here can be the level signal sent by the button circuit, or the click signal sent by the mouse, or the analog signal sent by the operating handle. After the main control module analyzes the above level signal or analog signal, it forms the first The CAN bus message is sent to the CAN bus, and the ID number of the first CAN bus message is used to indicate the specific device to be controlled. In one embodiment of the present invention, the angle of the first valve of the vehicle is controlled to be adjusted to 90 degrees through the buttons on the control panel.
[0032] Step S2, the controller reads the first CA...
Embodiment 2
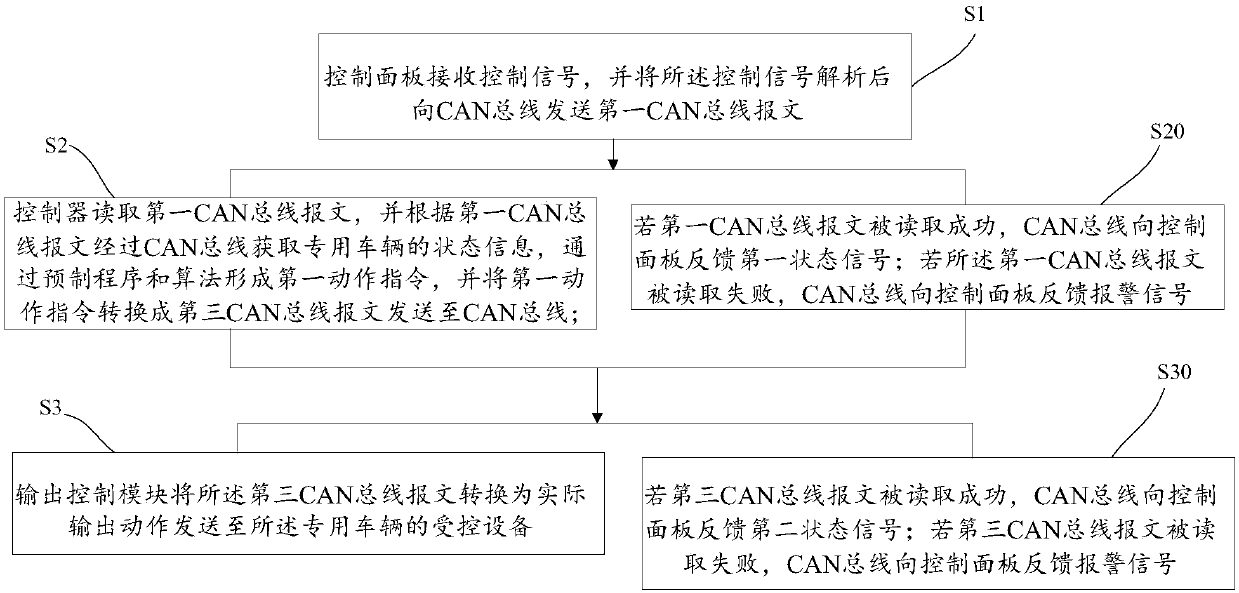
[0038] see image 3 , the step S2 also includes:
[0039] Step S20, if the first CAN bus message is read successfully, the CAN bus feeds back the first status signal to the control panel; if the first CAN bus message is read unsuccessfully, the CAN bus sends the control panel a Panel feedback alarm signal;
[0040] As an embodiment of the present invention, the control panel also has an indicator light and an alarm. After pressing the first control button, the main control module sends the first CAN bus message to the CAN bus, and the controller reads successfully, and the first indicator light It starts to flash, the reading fails, and the alarm sounds.
[0041] The step S3 also includes:
[0042] Step S30, if the third CAN bus message is successfully read, the CAN bus feeds back a second status signal to the control panel; if the third CAN bus message is read unsuccessfully, the CAN bus sends the control panel a The panel feeds back the alarm signal.
[0043] The output a...
Embodiment 3
[0045] see Figure 4 , in an embodiment of the present invention:
[0046] Step S1 further includes: the sensor collection module converts the physical signal collected by the sensor into a second CAN bus message containing the state information of the special vehicle and sends it to the CAN bus.
[0047] The physical signals here include current signals, voltage signals, switch signals, analog signals, etc. The status information of the vehicle includes the position of the vehicle, the height of the components, the opening and closing state, the extension length, etc. This series of information can be passed through the sensor After detecting and transmitting, the controller obtains these data through the CAN bus, and calculates and obtains the actions of each control component as parameters.
[0048] Also include after step S3:
[0049] Step S4, the display module reads the second CAN bus message, and converts the second CAN bus message into visual data for presentation. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More