Moxibustion intelligent cooperation robot and operating method thereof
A robot and moxibustion technology, which is applied to manipulators, program-controlled manipulators, and instruments for determining reflex points, etc., can solve the problems of poor moxibustion effect, poor accuracy of acupoint positions, and deviation of acupoint positions, so as to improve moxibustion. effect, easy to adjust the temperature of moxibustion, easy to adjust
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
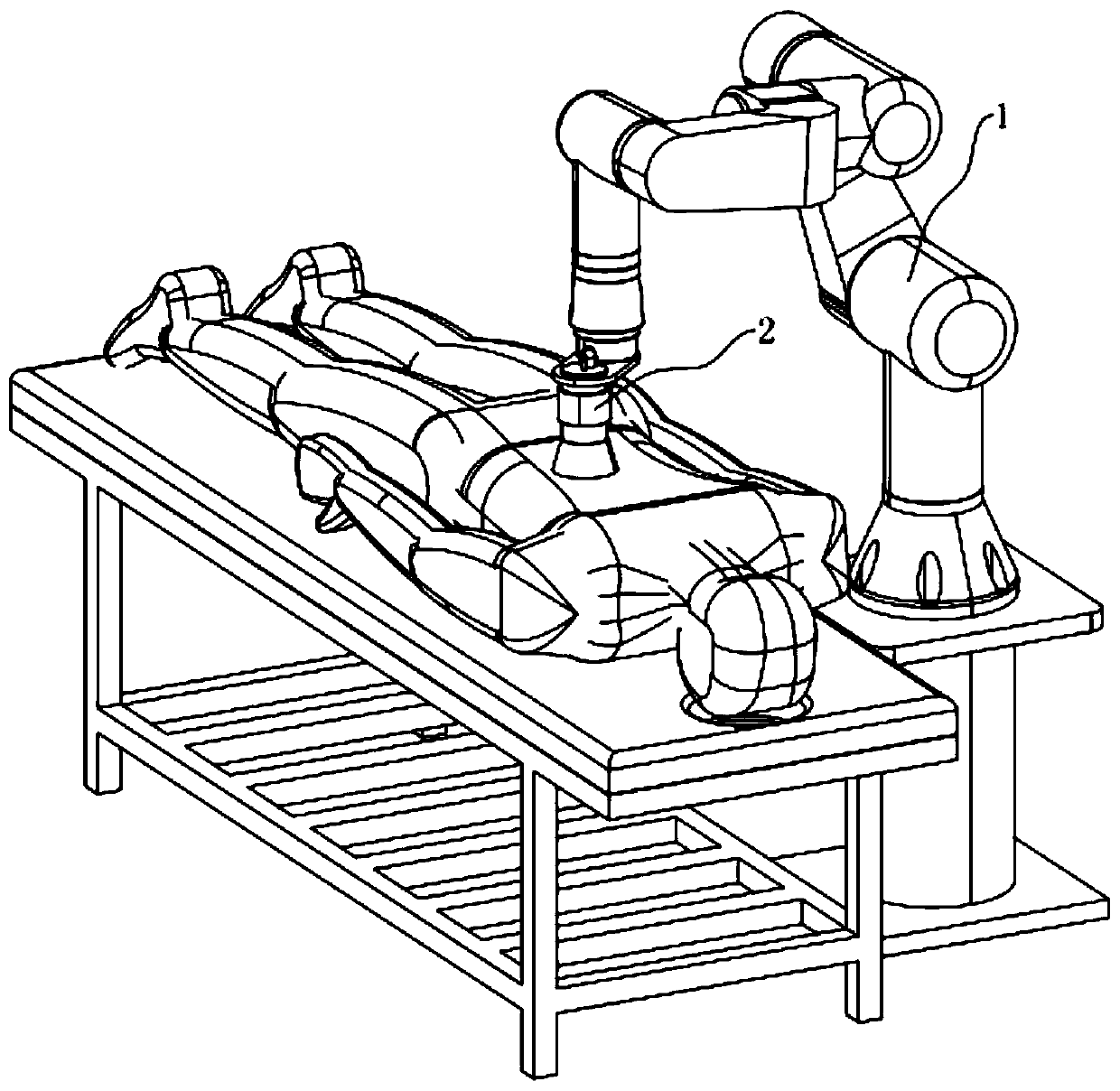
[0046] Embodiment one: a moxibustion intelligent collaborative robot, such as figure 1 As shown, it includes not less than one joint collaborative robot 1 and a moxibustion mechanism 2 arranged at the grasping end of the joint collaborative robot 1. In this embodiment, the joint collaborative robot 1 and the moxibustion mechanism 2 are specifically set to one, and the joint The collaborative robot 1 is set as a six-axis joint robot, so as to be able to simulate various operation actions, and realize methods such as positioning, pecking, rotating, and moving in the process of moxibustion physiotherapy.
[0047] Such as figure 1 As shown, the moxibustion mechanism 2 is detachably installed on the grasping end of the joint collaborative robot 1, so as to facilitate the disassembly and replacement of the moxibustion mechanism 2 and improve the service life of the equipment. The moxibustion mechanism 2 can be installed with bolts or other easily disassembled structures, which are ...
Embodiment 2
[0054] Embodiment 2, the difference between this embodiment and the embodiment is that, as Figure 4 As shown, there are two joint collaborative robots 1 and two moxibustion mechanisms 2, and the two joint collaborative robots 1 are respectively arranged on the left and right sides of the human body, and the two moxibustion mechanisms 2 are installed on the grasping ends of the two joint collaborative robots 1 respectively. . Physicians can simultaneously hold the grasping ends of the two joint collaborative robots 1 to move while performing path simulation, and the paths of the two joint collaborative robots 1 do not interfere with each other, so that the two joint collaborative robots 1 can be used to cooperate with the moxibustion mechanism 2 Simultaneously carry out moxibustion physiotherapy on two acupoints to reduce the time required for the entire moxibustion process and improve the efficiency of physiotherapy. At the same time, if there are few acupoints requiring mox...
Embodiment 3
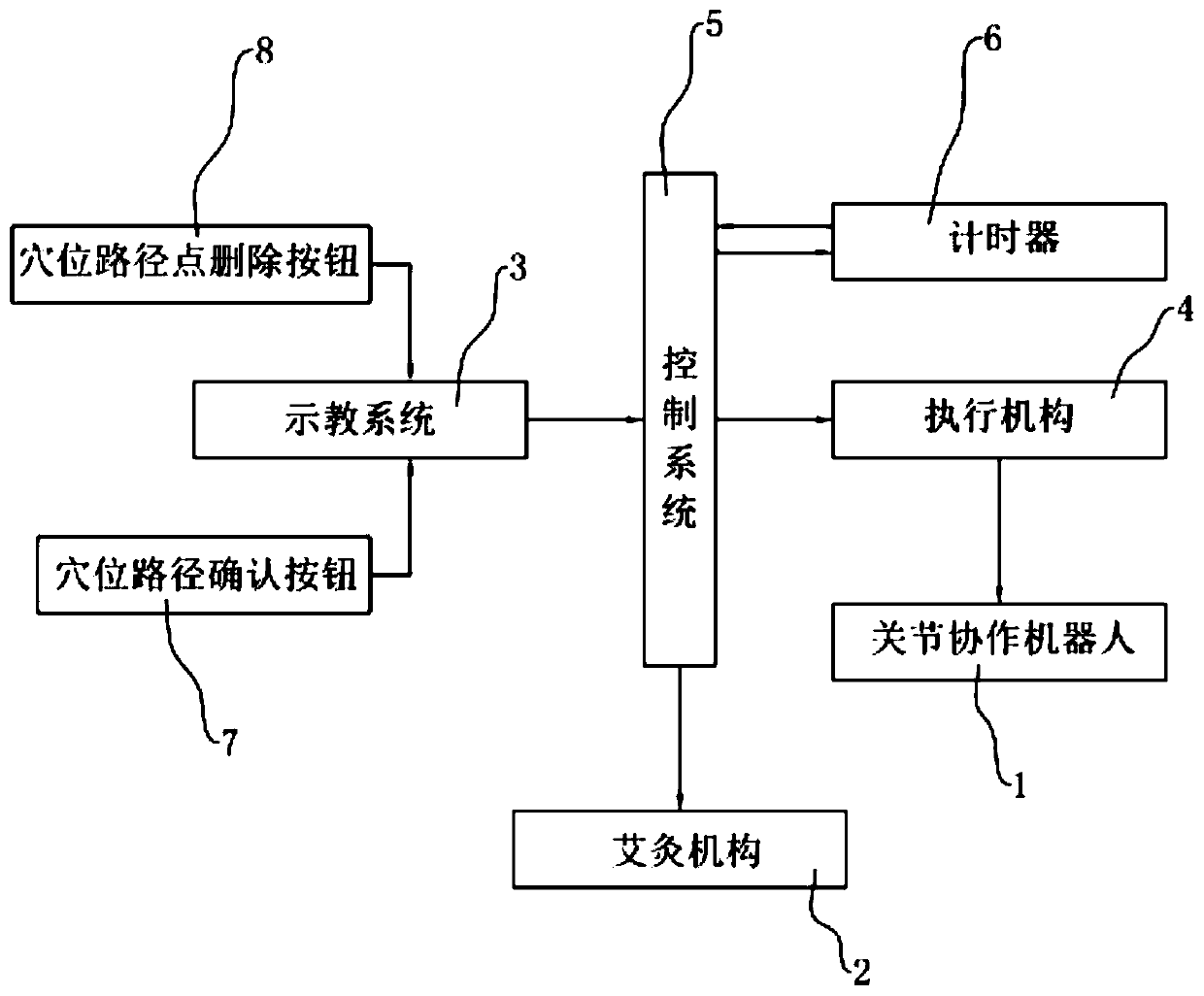
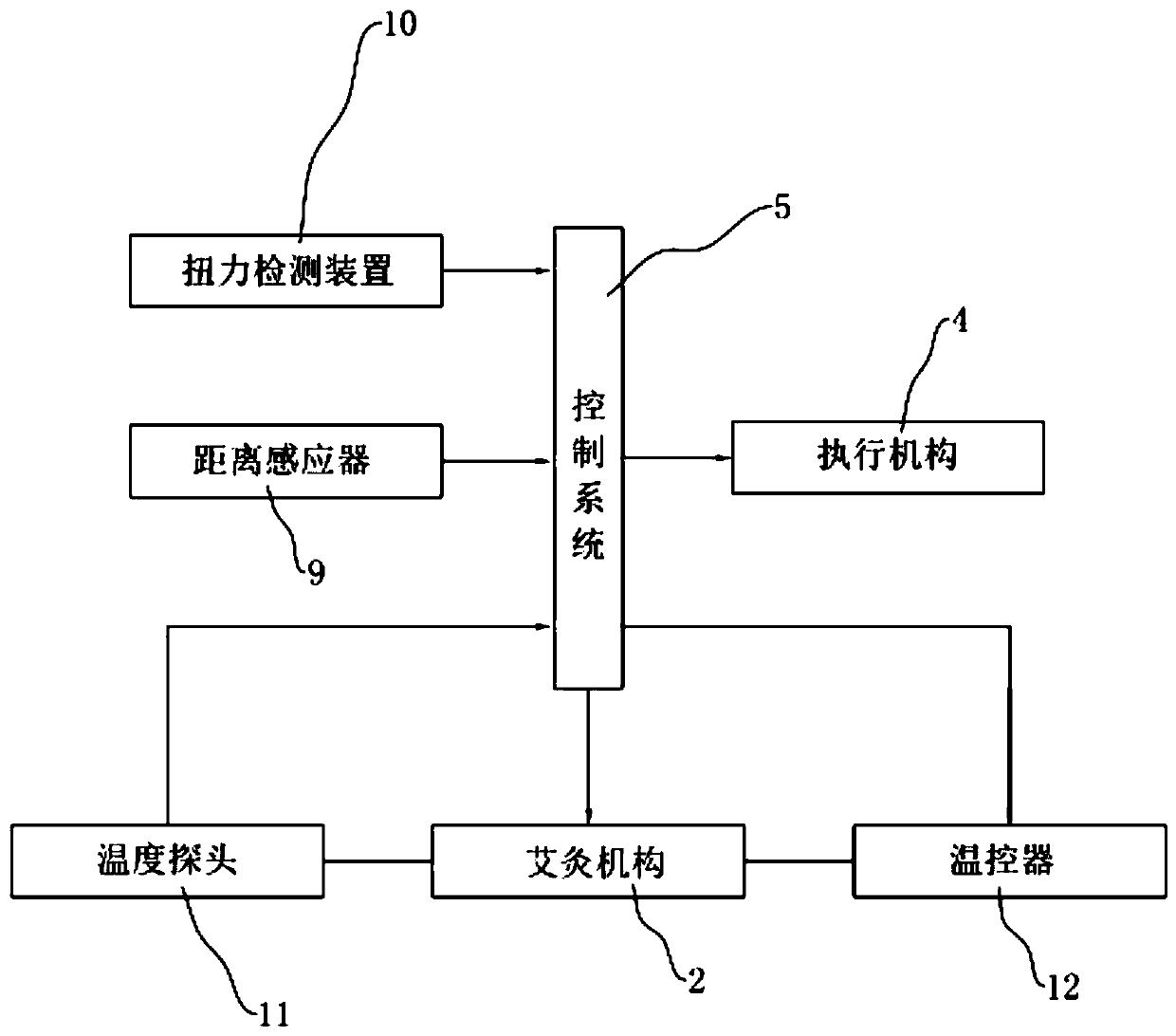
[0055] Embodiment 3, this embodiment is to provide an operation method of a moxibustion intelligent collaborative robot, such as figure 1 , figure 2 with image 3 shown, including the following steps:
[0056] (1) The doctor holds the grasping end of the joint collaborative robot 1 to simulate the stroke, and the teaching system 3 records and saves the path coordinate parameters, and every time the doctor moves to an acupoint that needs moxibustion, the doctor controls the acupoint path point confirmation button 7 Confirmed as acupoint path points until each acupoint that needs moxibustion is confirmed in order;
[0057] (2) The doctor operates the control system 5, sets the timing time of the timer 6 according to the moxibustion time requirement for each acupoint path point, and records it in the timer 6 after setting, and at the same time, sets the moxa moxibustion time for each acupoint path point. The temperature of moxibustion is adjusted by the temperature controller...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com