Gain compensation self-adaptive filtering-based SINS (strap-down inertial navigation)/DVL (Doppler velocity log) combined positioning method
A technology of adaptive filtering and gain compensation, which is applied in the direction of sound wave reradiation, radio wave measurement system, navigation through speed/acceleration measurement, etc., and can solve the problem of low positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
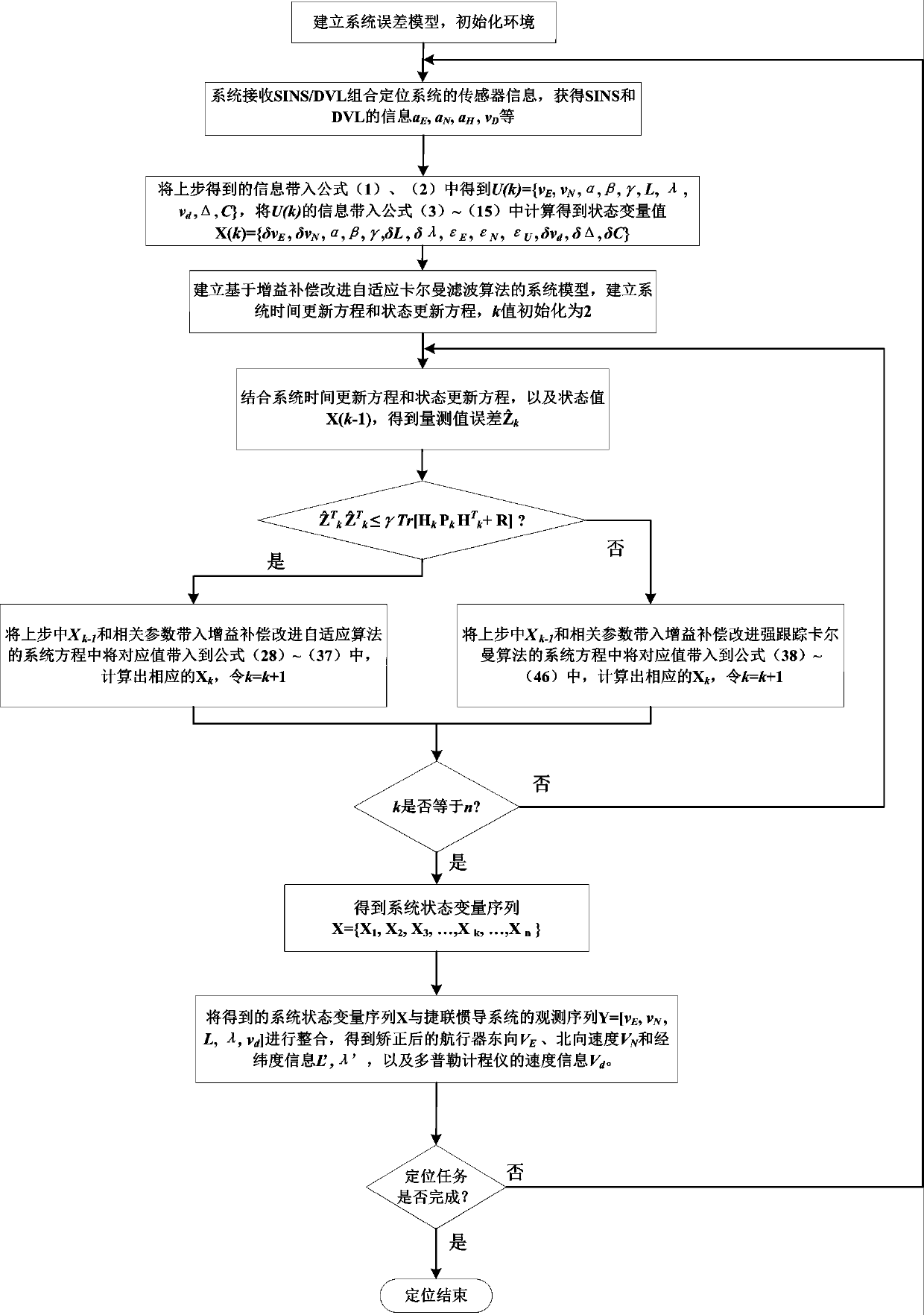
[0100] Step 1, the system establishes the SINS / DVL combined positioning error model state variable X=[δv E δv N α β γ δL δλ ε E ε N ε U δv d δΔδC] T , where δv E and δv N α, β, γ are platform misalignment angles, δL and δλ are longitude and latitude errors, ε E , ε N , ε U is the gyro drift in the east, north and sky directions, δv d is the Doppler measurement velocity offset error, δΔ is the bias angle error, and δC is the scale coefficient error;
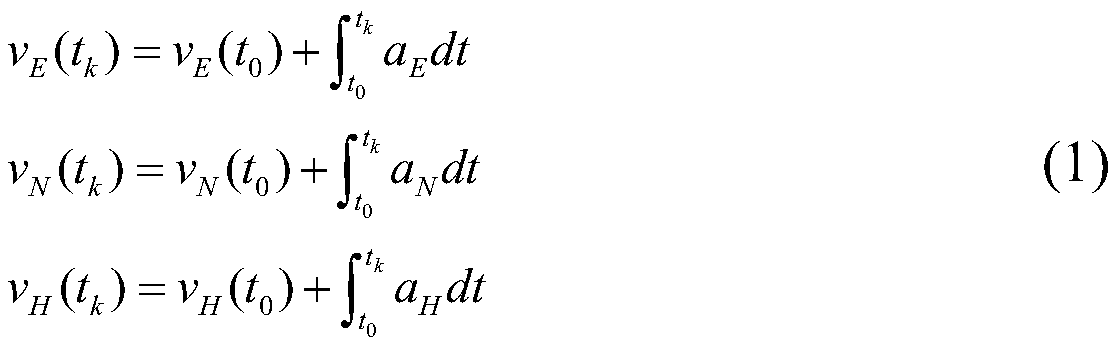
[0101] Step 2. The system measures the three-axis (east, north, sky) acceleration information a through the three-axis angular velocity information of the gyroscope sensitive carrier in the inertial navigation component and the accelerometer E 、a N 、a H , Velocity v obtained by Doppler log d , navigation information such as drift angle Δ and attitude;
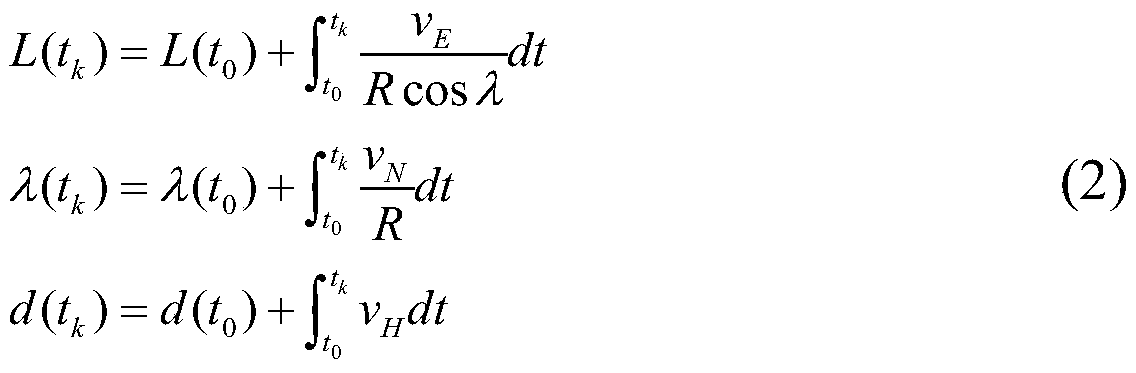
[0102] Step 3. The system converts the acceleration components a in these three directions E 、a N 、a H Putting into formula (1) and integrating respectively...
specific Embodiment approach 2
[0192] Specific embodiment 2, this embodiment is a further description of step 7 of a SINS / DVL combined positioning method for gain compensation adaptive filtering described in specific embodiment 1, which is characterized in that the criterion for judging whether the filtering is divergent, according to the filtering The relationship between the estimated error and the expected error is judged.
specific Embodiment approach 3
[0193] Specific embodiment three, this embodiment is a further description of the SINS / DVL combined positioning method for gain compensation adaptive filtering described in specific embodiment one, which is characterized in that the filter gain compensation algorithm adopted is aimed at underwater The external disturbance of the ocean current or the sudden change of the speed and course of the underwater vehicle will cause a slight delay in the estimated value of the filtering process when tracking the real state of the underwater vehicle, thus reducing the navigation accuracy and quality. Real-time tracking of system status and reduced error accumulation.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com