

Generating method and system of autopilot navigation map, vehicle terminal and server
A technology for navigation maps and automatic driving, applied in directions such as road network navigators, can solve the problems of low map update efficiency and slow update speed, and achieve the effects of improving accuracy, reducing errors, and improving stability and reliability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
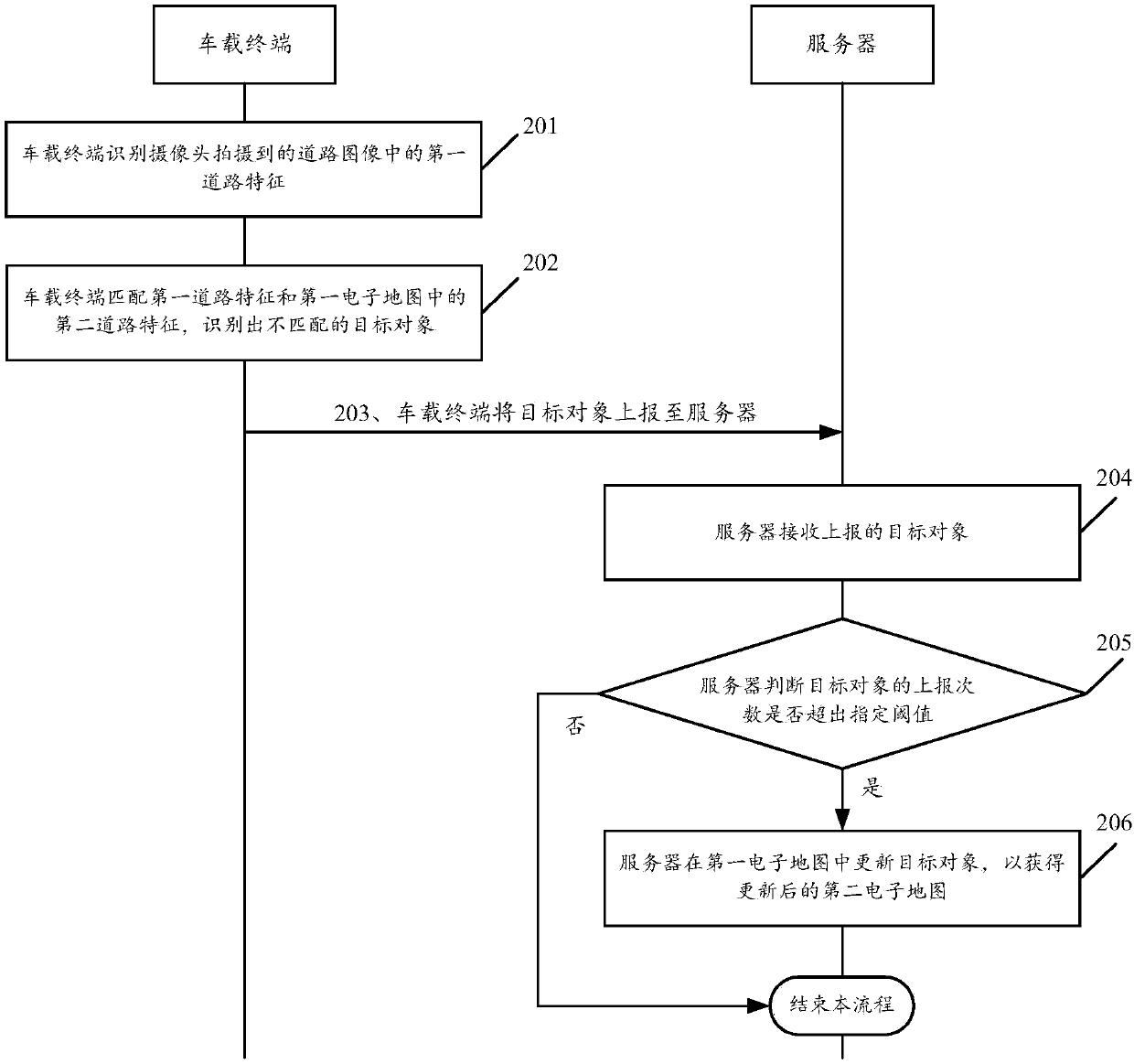
[0070] See figure 2 , figure 2 It is a schematic flowchart of a method for generating an automatic driving navigation map disclosed in an embodiment of the present invention. Wherein, the method is applied to in-vehicle terminals such as an in-vehicle computer and an in-vehicle industrial control computer (Industrial Personal Computer, IPC), which is not limited in the embodiment of the present invention. Such as figure 2 As shown, the method for generating the autonomous driving navigation map may include the following steps:
[0071] 201. The vehicle-mounted terminal recognizes a first road feature in a road image captured by a camera.
[0072] In the embodiment of the present invention, the viewfinder range of the camera includes at least the environment in front of the vehicle, the camera and the vehicle-mounted terminal may have data transmission, and the vehicle-mounted terminal obtains real-time road images captured by the camera during the driving of the vehicle. As an ...
Embodiment 2
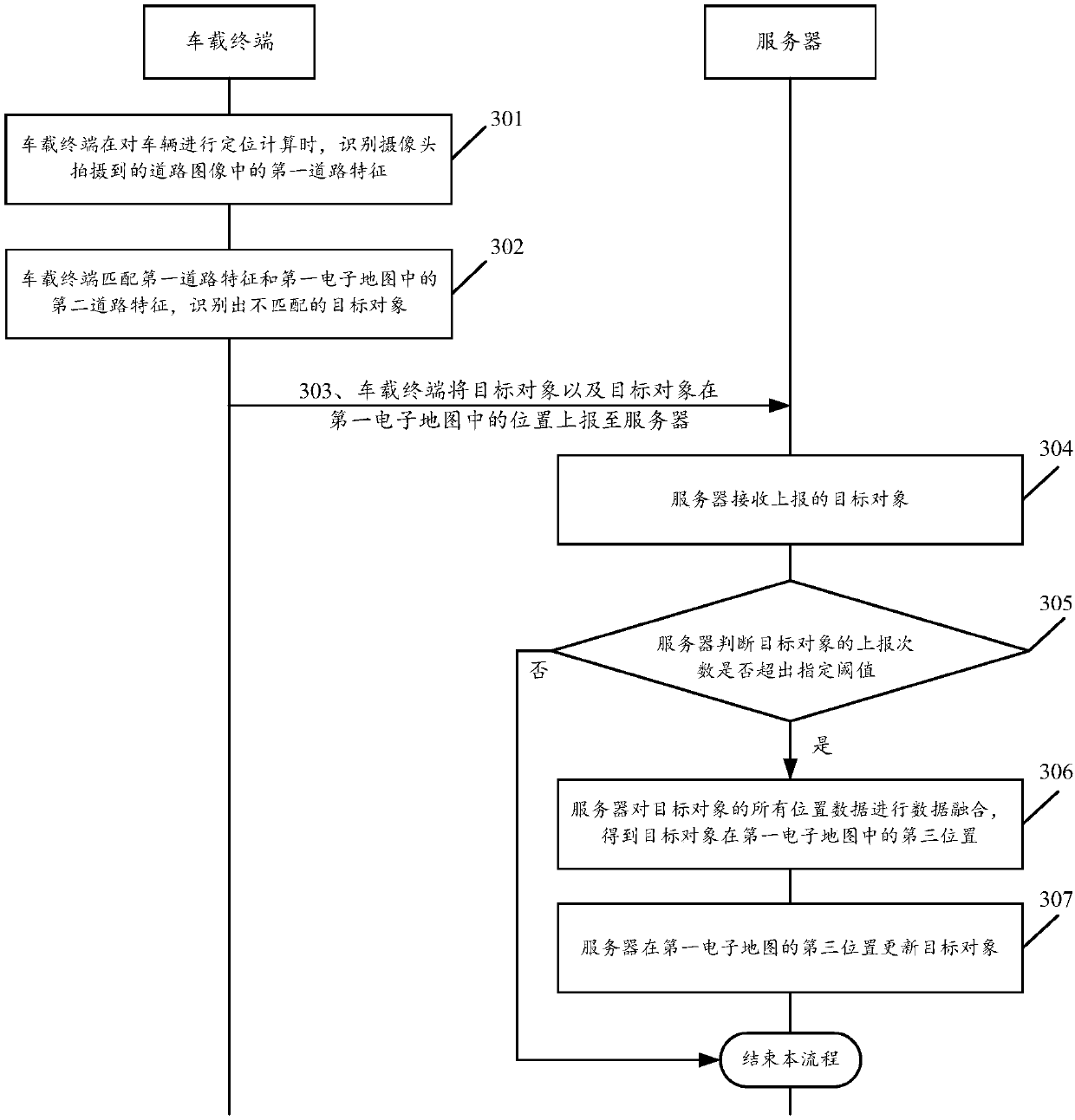
[0091] See image 3 , image 3 It is a schematic flowchart of another method for generating an automatic driving navigation map disclosed in an embodiment of the present invention. Such as image 3 As shown, the method for generating the autonomous driving navigation map may include the following steps:
[0092] 301. The vehicle-mounted terminal recognizes the first road feature in the road image captured by the camera when performing positioning calculation of the vehicle.
[0093] In the embodiment of the present invention, the viewfinder range of the camera includes at least the environment in front of the vehicle. Those skilled in the art can understand that a possible implementation manner for the vehicle-mounted terminal to perform positioning calculation for the vehicle may be as follows: identify the first road feature in the road image, and according to the automatic navigation electronic map matching the first road feature Feature position, calculate the position of the ...
Embodiment 3
[0126] See Image 6 , Image 6 It is a schematic structural diagram of a vehicle-mounted terminal disclosed in an embodiment of the present invention. Such as Image 6 As shown, the vehicle-mounted terminal may include:
[0127] The recognition unit 601 is used for recognizing the first road feature in the road image captured by the camera; wherein the viewfinder range of the camera includes at least the front environment of the vehicle where the vehicle-mounted terminal is located.
[0128] In the embodiment of the present invention, as an optional implementation manner, the recognition unit 601 may recognize the first road feature in the road image through a pre-trained semantic feature detection model. The semantic feature detection model may be a deep learning neural network. The aforementioned semantic feature detection model uses a large number of sample images marked with the aforementioned first road feature as training input, and finally a deep learning neural network obta...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More