

Pose estimation method for a visual inertial navigation odometer based on a sparse feature method
A sparse feature and pose estimation technology, which is applied in the field of pose estimation of visual inertial navigation odometry, and can solve the problems of increasing the smoothness of the estimated trajectory and the inability of quadrotors to carry large computing equipment.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0064] Reference will now be made in detail to the exemplary embodiments, examples of which are illustrated in the accompanying drawings. The implementations described in the following exemplary examples do not represent all implementations consistent with the present invention. Rather, they are merely examples of arrangements consistent with aspects of the invention as recited in the appended claims. Each embodiment in this specification is described in a progressive manner.
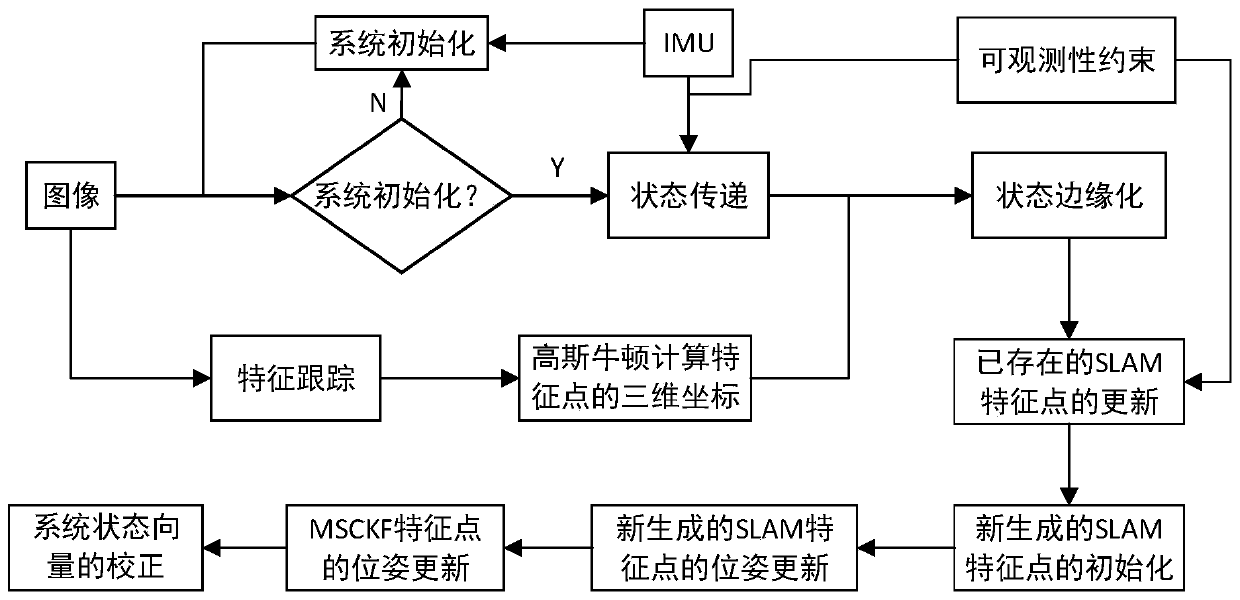
[0065] Such as figure 1 As shown, the present invention provides a method for estimating the pose of a visual-inertial navigation odometer based on the sparse feature method, comprising the following steps:
[0066] (1) When the second frame image arrives, integrate the acceleration and angular velocity output by all inertial sensing units between the second frame image and the first frame image to obtain the initial value of the system state, and use the direction of gravity to define the initial coo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More