

Optimization method of five-degree-of-freedom first-end symmetric mechanical arm inverse kinematics calculation
An optimization method and inverse kinematics technology, applied in manipulators, complex mathematical operations, program-controlled manipulators, etc., can solve problems such as limited calculation accuracy, affecting calculation speed, multi-category discussion, etc., to achieve real-time response, improve calculation accuracy and The effect of calculating speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
[0026] An optimization method for calculating the inverse kinematics of a first-end symmetrical manipulator, the specific steps of which are as follows:
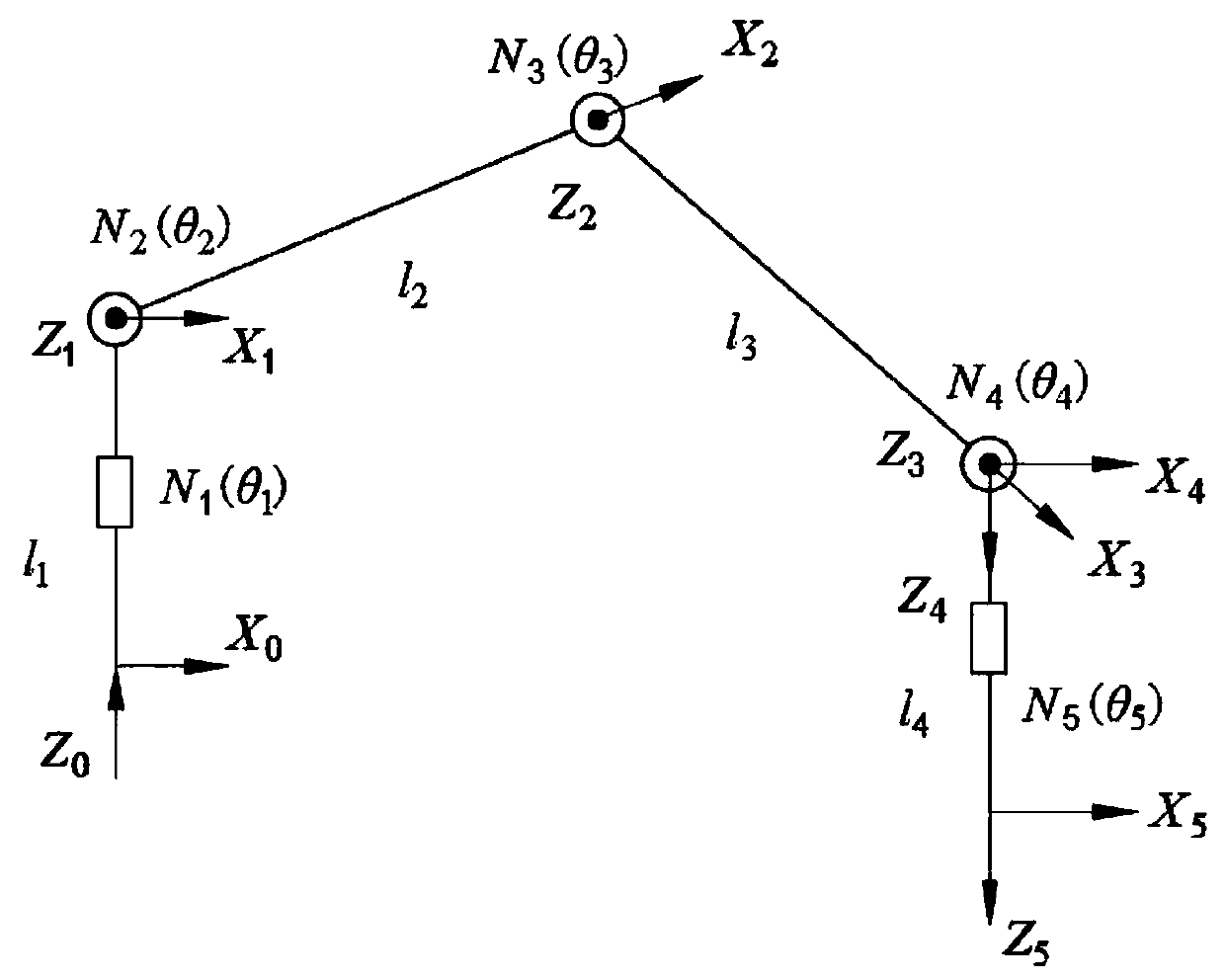
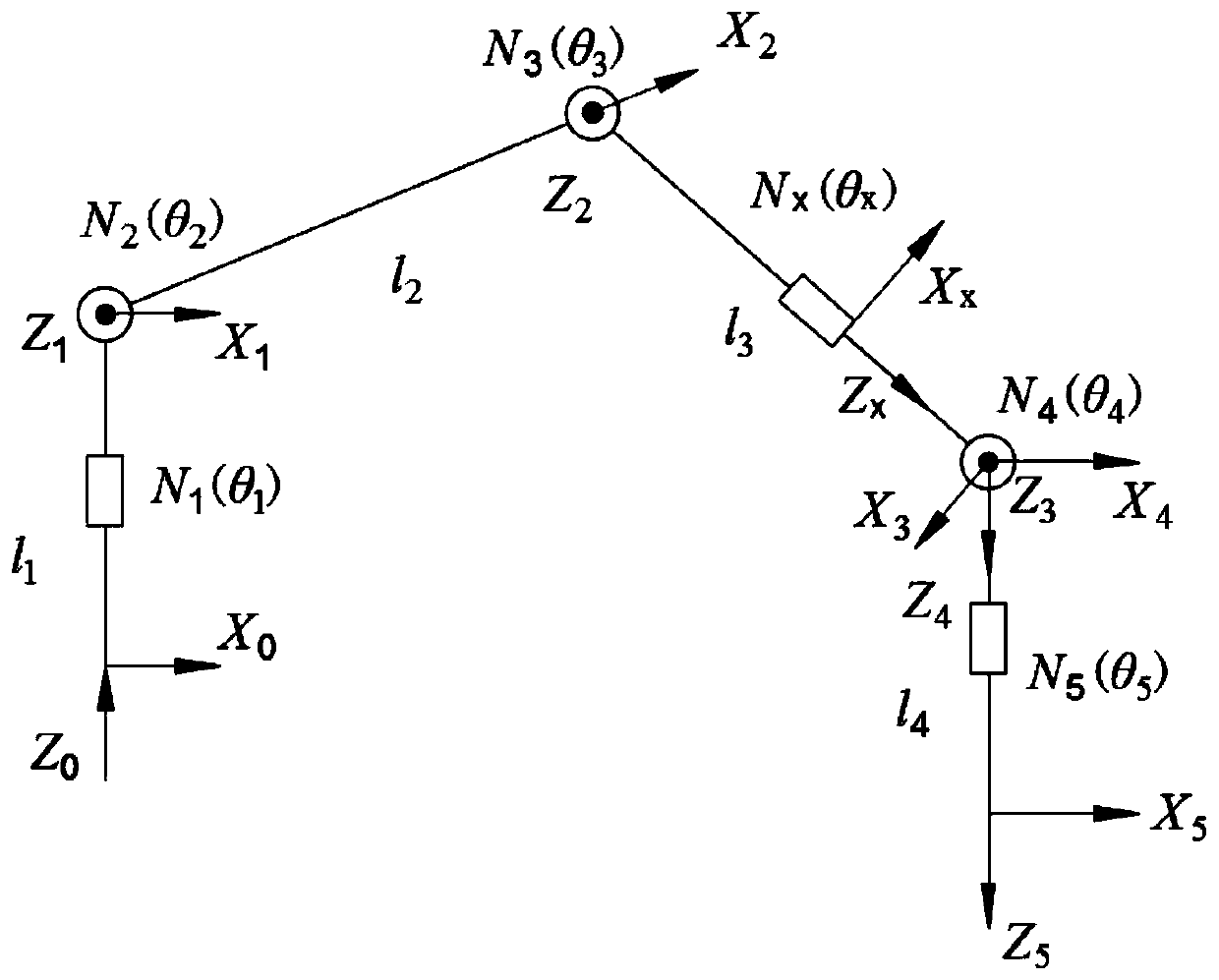
[0027] a) if figure 1 , figure 2 As shown in , the joints of the five-degree-of-freedom first-end symmetrical manipulator are labeled in the order from the base to the actuator, the joint at the base is marked as the first joint, the joint at the actuator is marked as the fifth joint, and Add a virtual rotary joint whose rotation angle is always zero between the third and fourth joints to calculate the DH parameters of the manipulator;
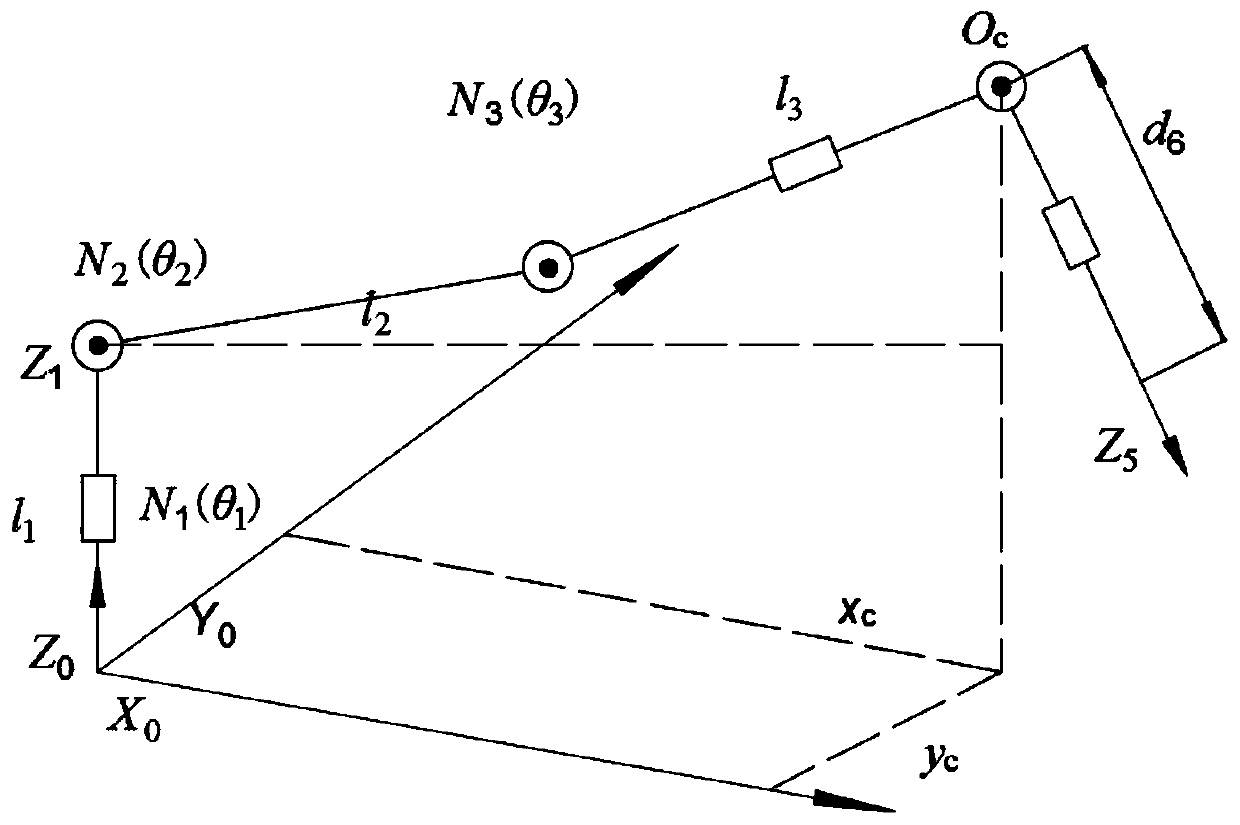
[0028] b) The shape and position of the given target are relative to the inertial coordinate system O 0 x 0 Y 0 Z 0 The homogeneous transformation matrix T O , take T O The first 3 rows and the first 3 columns of the sub-matrix are the target position O 6 Th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More