

A method and terminal for measuring the volume of an object
An object and volume technology, applied in the field of volume measurement, can solve the problem of inability to find objects with depth data, and achieve the effect of accurate depth data and accurate volume of objects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 2 example
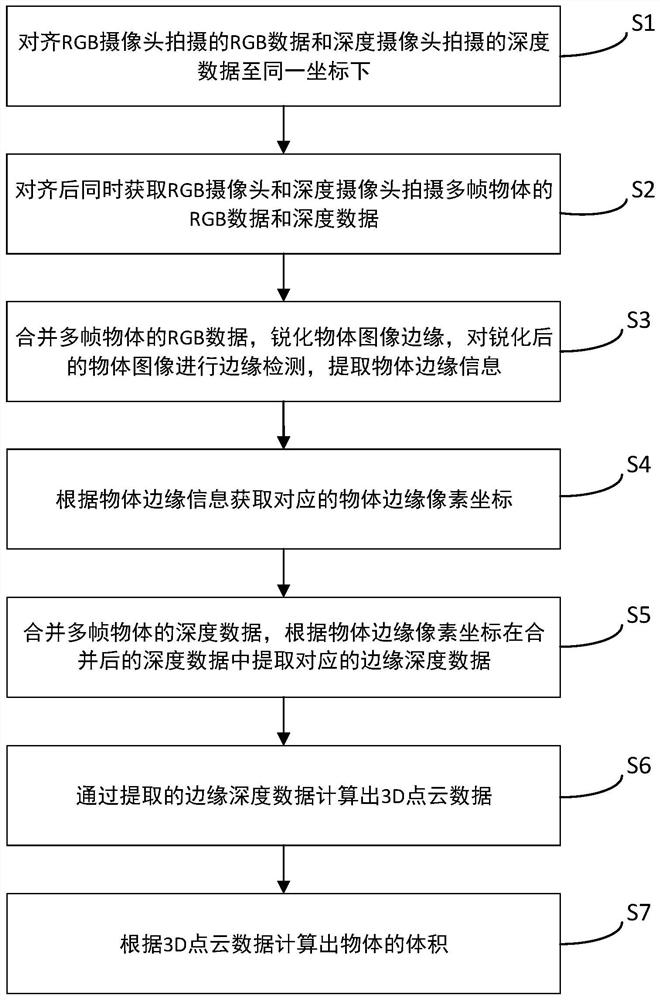
[0059] The second embodiment, on the basis of the first embodiment, see figure 2 , figure 2 It is a flow chart of the method for measuring the volume of an object in the second embodiment of the present invention. Specifically, in step S1: aligning the RGB data captured by the RGB camera and the depth data captured by the depth camera to the same coordinates, which includes:
[0060] S1-1: Receive multiple checkerboard pictures from different viewing angles taken by the RGB camera, use OpenCV or Matlab software to process the pictures, and calculate the external parameters of the RGB camera corresponding to each picture; where the external parameters include: the first rotation matrix R 1 and the first translation matrix t 1 . The external parameter is the rotation and translation relationship between the world coordinate system and the camera coordinate system, expressed as: Among them, the first rotation matrix R 1 is a 3*3 orthogonal identity matrix, R 1 The i-th ro...
no. 1 example
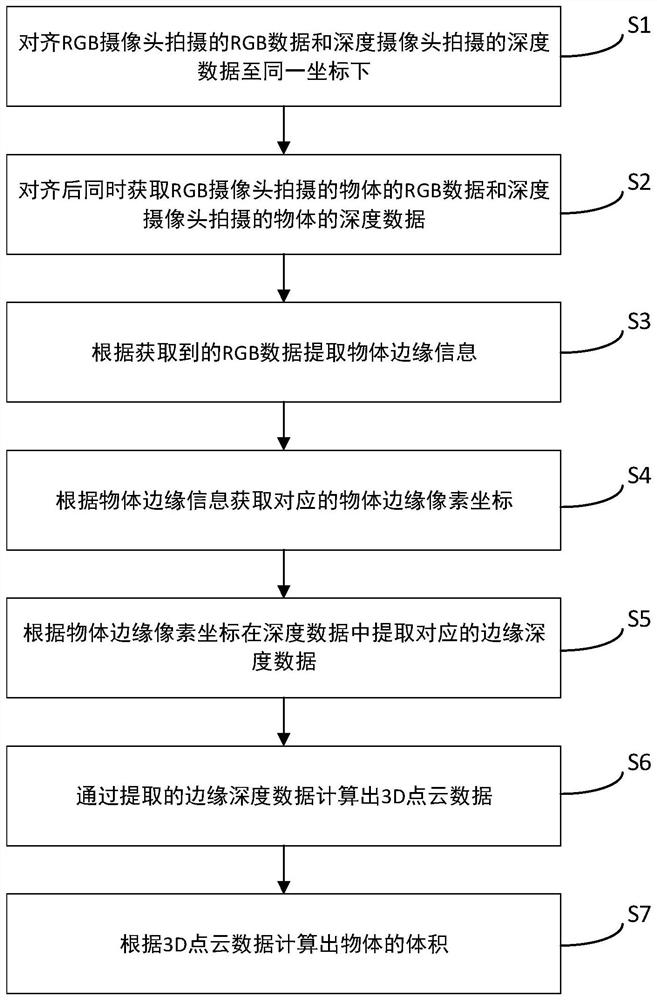
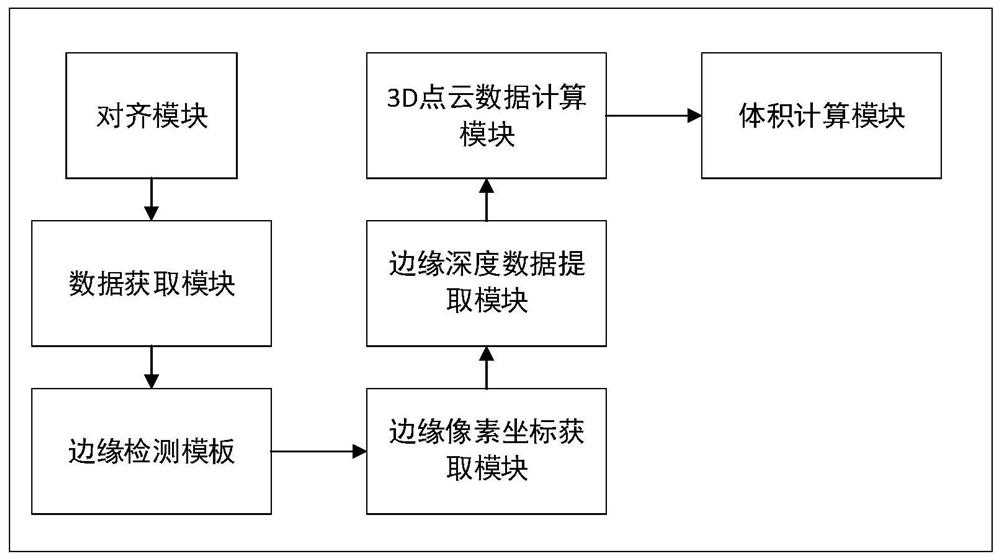
[0072] The present invention also constructs a terminal for measuring the volume of an object, see image 3 , image 3 It is a block diagram of a terminal for measuring the volume of an object in the first embodiment of the present invention. In the first embodiment, it includes: an RGB camera and a depth camera, and also includes:
[0073] The alignment module is used to align the RGB data captured by the RGB camera and the depth data captured by the depth camera to the same coordinates;
[0074] The data acquisition module is used to obtain the RGB data of the object photographed by the RGB camera and the depth data of the object photographed by the depth camera simultaneously after being aligned;
[0075] The edge detection template is used to extract object edge information according to the RGB data obtained by the data acquisition module;
[0076] The edge pixel coordinate acquisition module is used to acquire the corresponding object edge pixel coordinates according to...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More