

Non-Newtonian fluid pneumatic soft touch hand and forming method thereof
A non-Newtonian fluid and tentacle technology, which is applied in the direction of manipulators, chucks, manufacturing tools, etc., can solve problems such as difficult to guarantee its own stability, uncontrollable stiffness of pneumatic soft tentacles, and difficult control of pneumatic soft manipulators.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
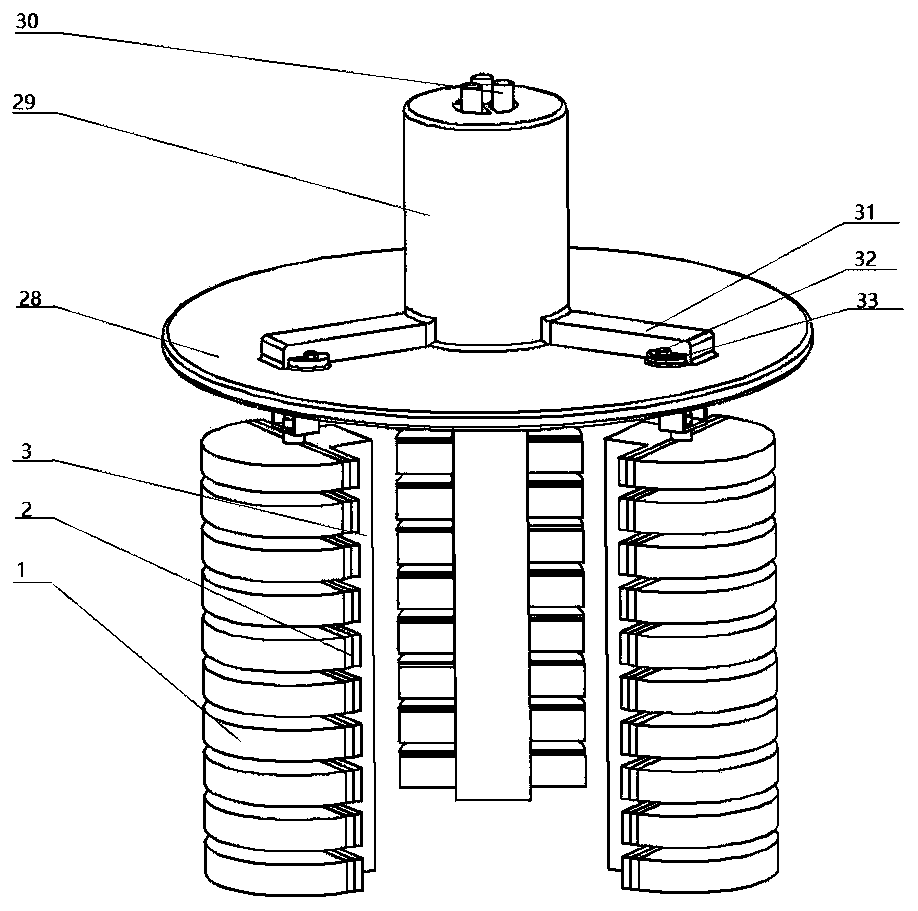
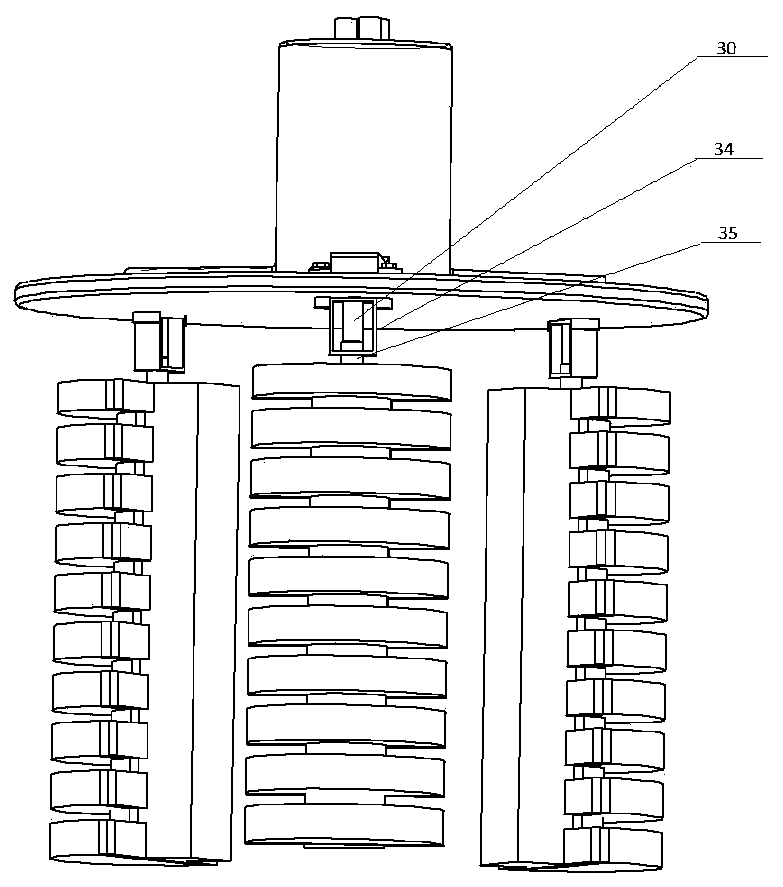
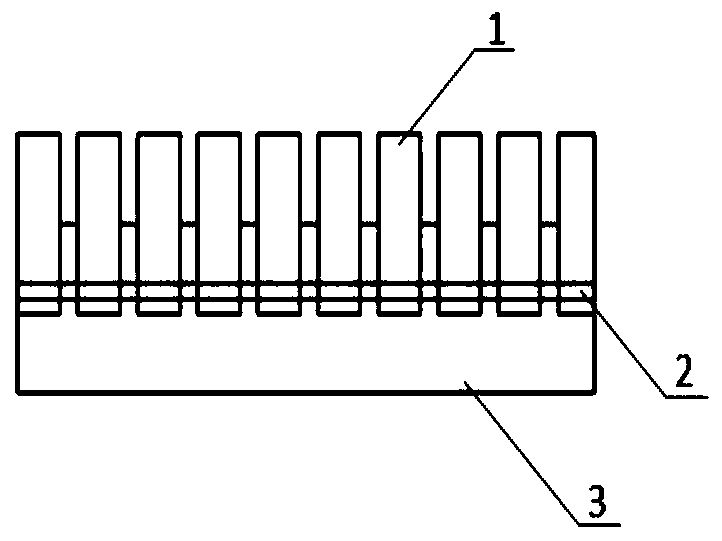
[0054] Open the air hole 4 on the side of the upper part of the actuated cavity unit 1 after fabrication, align the needle tube with the airway 5 in the upper part, and then pierce it in, exchange for needle tubes of different needle sizes to gradually expand, and finally introduce a needle tube with a diameter of 3 mm. Trachea, trachea 30 is connected with tentacle joint part with snap ring 35, prevents air leakage. The three air pipes 30 pass through the snap ring 35, the fixed frame 34, the chassis 28 and the rectangular channel 31, and are finally fixed together by the cylinder 29 with three channels in the middle. The gas is pressed into the air channel 5 through the air tube 30 by the driving device (air pump or syringe), and then rushes into the air cavity 6. Under the action of the air pressure, the air cavity 6 is deformed, but since the middle part is a strain-limited layer, the deformation is small, so The whole will bend towards the middle part. Due to the bending...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More