

Robust positioning method based on arrival time difference under non-line-of-sight error condition
A positioning method and non-line-of-sight technology, applied in the field of target positioning, can solve problems such as intractability, achieve good positioning effect and improve positioning accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] In order to enable those skilled in the art to better understand that the technical solutions of the present invention can be implemented, the present invention will be further described below in conjunction with specific examples, but the given examples are only used as illustrations of the present invention, not as limitations of the present invention.
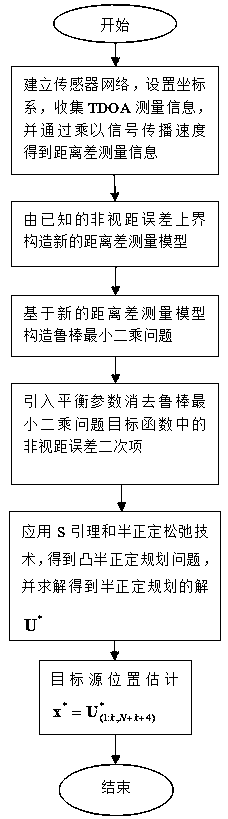
[0035] The present invention proposes a robust positioning method based on time difference of arrival positioning under non-line-of-sight conditions, and its technical flow diagram is as follows figure 1 As shown, the specific steps are as follows:
[0036] S1: Establish a wireless sensor network: establish a reference coordinate system in the wireless sensor network, set the origin of the coordinate system as , and refer to the anchor node Placed at the origin of the coordinates, other Anchor nodes are placed in different positions of the coordinate system, and the corresponding coordinate points are respectively...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More