

Ant colony algorithm applied to robot path planning
A technology of path planning and ant colony algorithm, which is applied in the computer field, can solve problems such as slow algorithm convergence speed and long search time, and achieve the effect of improving the convergence speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
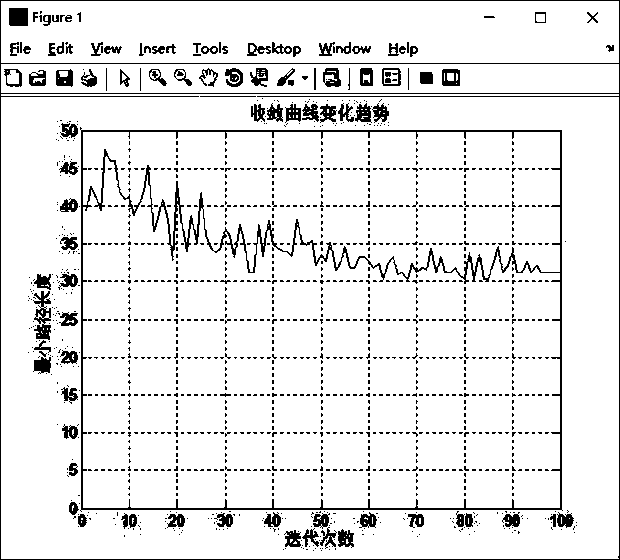
[0032] The ant colony algorithm applied to robot path planning of the present invention aims at the problem of slow convergence caused by the lack of pheromone in the early stage of ant colony algorithm, and the weight parameters α (information heuristic factor) and β (expectation heuristic factor) of pheromone and heuristic information ) to improve and dynamically adjust the two parameters; in addition, a local optimal direction guidance mechanism is added to construct a new path selection probability. The specific steps are as follows:
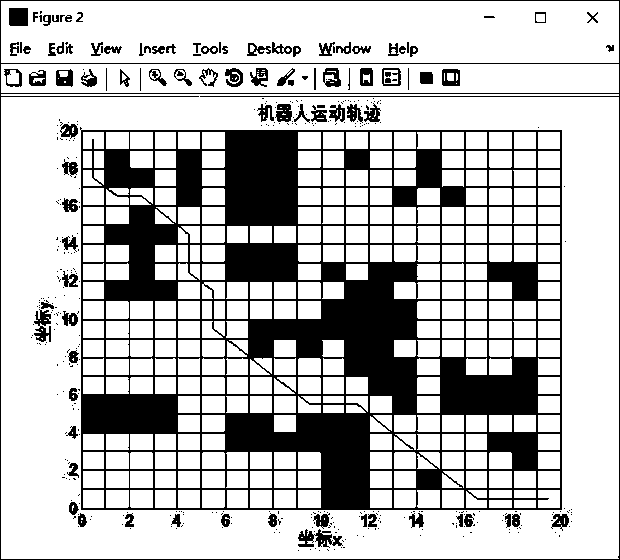
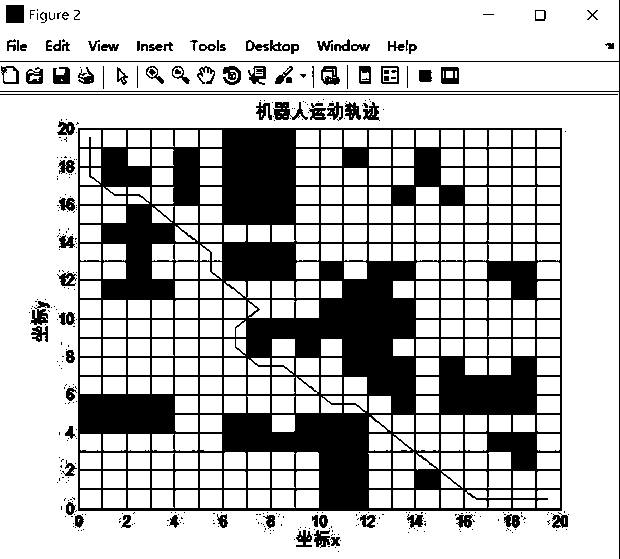
[0033] 1) Use the grid method to establish the simulation environment where the robot runs, such as figure 1 As shown in , where the black squares represent obstacles, and the white squares represent the ground on which the robot can walk;
[0034] 2) Input the initial pheromone matrix, select the initial point and end point and set various parameters. The relevant parameters of the algorithm are set as follows: the total number of iterati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More