

Robot path planning system and method, computer readable storage medium and device
A path planning and robotics technology, applied in control/regulation systems, instruments, motor vehicles, etc., can solve problems such as low efficiency of static path planning, and achieve the effect of avoiding collision risks and improving work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0034] This embodiment provides a robot path planning system, including:
[0035] A map module, in which several path points and path lines are stored;
[0036] A weight setting module, configured to detect the working status of several of the route lines, and set the weight of each of the route lines according to the working status of the route lines;
[0037] The path planning module dynamically plans, stores and sends the optimal walking path between the two path points according to the weight of each path line;
[0038] The vehicle-mounted receiving modules are respectively arranged on several robots, and are used for receiving the optimal walking path and controlling the robot to move along the optimal walking path.
[0039] The path planning module is also provided with a state marking unit, the state marking unit is used to mark several path lines that the current robot is about to walk as fixed path lines, and the fixed path lines are paths to be walked that are not a...
Embodiment 2
[0045] This embodiment provides a robot path planning method.
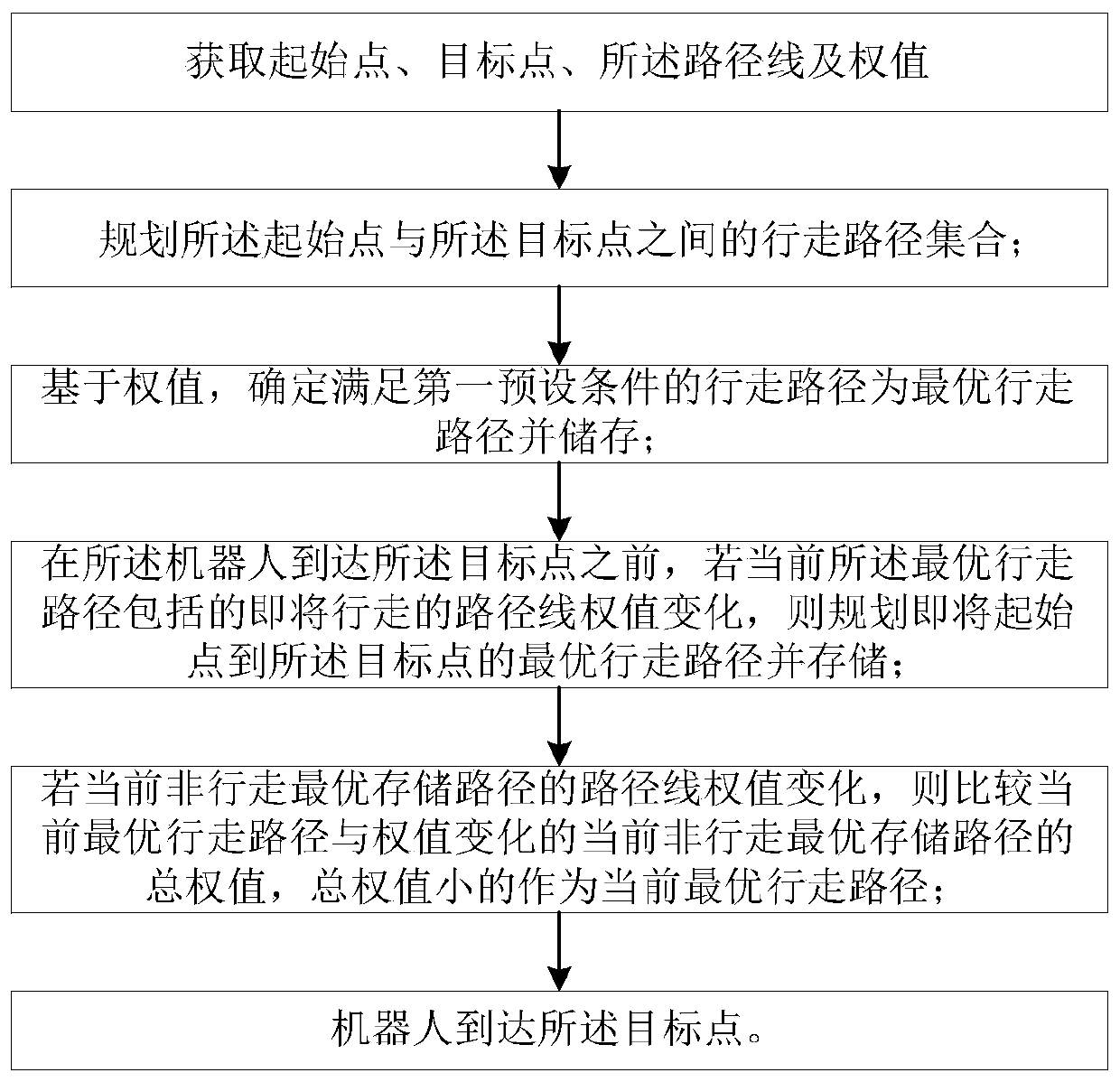
[0046] see figure 2 , the robot path planning method includes: obtaining a starting point, a target point, the path line and a weight;
[0047] Planning a set of walking paths between the starting point and the target point;
[0048] Based on the weight value, the walking path satisfying the first preset condition is determined as the optimal walking path and stored.
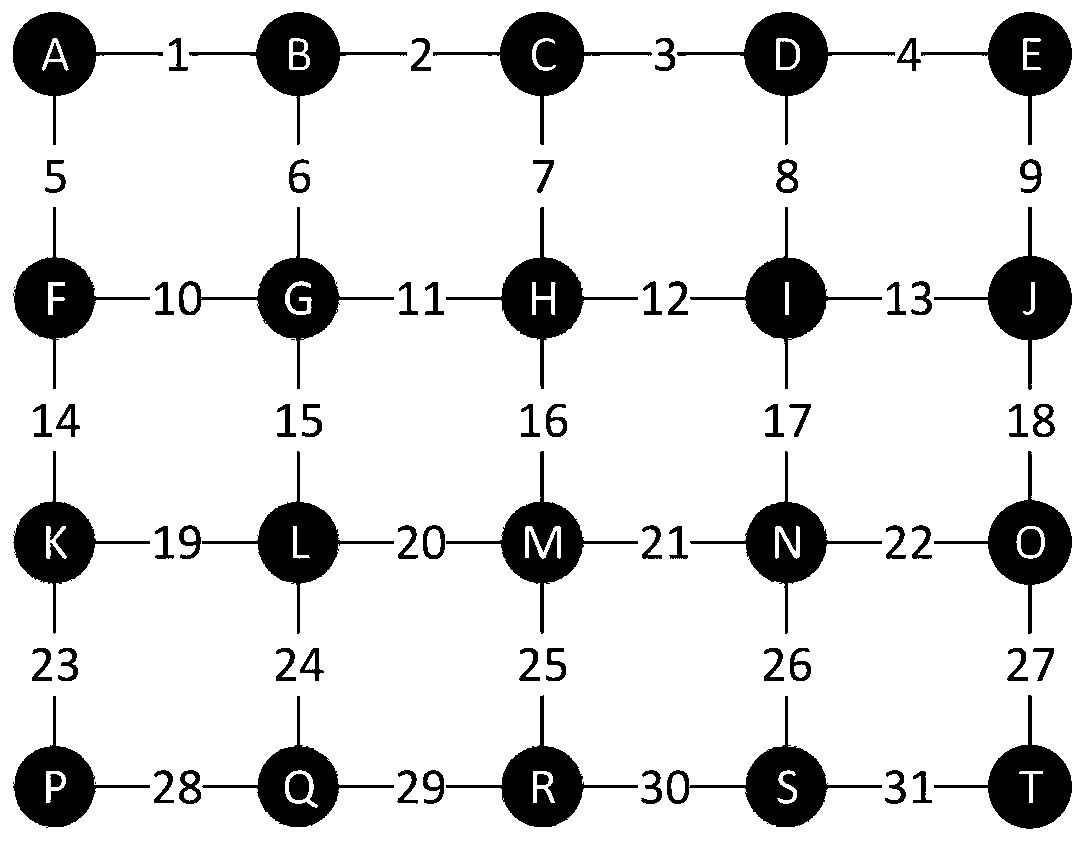
[0049] refer to figure 1 , Exemplarily, the robot numbered 1 is located at point A and needs to go to point E, then, the starting point is point A, and the target point is point E; planning a set of walking paths from point A to point E, Namely A-1-B-2-C-3-D-4-E, A-1-B-2-C-3-D-8-I-13-J-9-E, A-5-F -10-G-11-H-12-I-13-J-9-E and so on, and then based on the weight value, determine and store the walking path satisfying the first preset condition as the optimal walking path.
[0050] The first preset condition may be that in the set of walking paths...
Embodiment 3
[0069] This embodiment provides a computer-readable storage medium, on which a computer program is stored, and when the processor reads the computer-readable storage medium, the robot path planning method described above is executed.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More