

Intelligent vehicle track changing trajectory planning system and method based on artificial potential field method
An artificial potential field method and intelligent vehicle technology, applied in the field of intelligent vehicle lane-changing trajectory planning system based on the artificial potential field method, can solve problems such as stability and potential safety hazards, achieve the effect of smooth driving process and improved implementability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
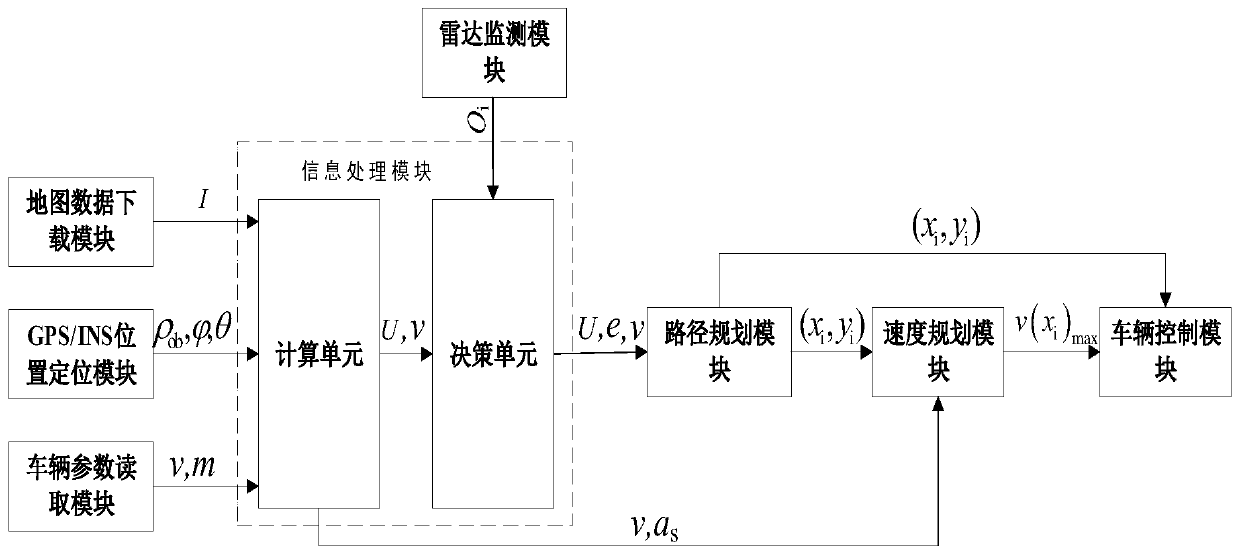
[0020] Such as figure 1 As shown, a kind of intelligent vehicle lane-changing track planning system based on the artificial potential field method of the present invention consists of a map data download module, a GPS / INS position positioning module, a radar monitoring module, a vehicle parameter reading module, an information processing module, and a path planning module , a speed planning module and a vehicle control module, wherein the information processing module includes two parts, a computing unit and a decision-making unit, and the computing unit and the decision-making unit are connected in series. The output terminals of the map data download module, GPS / INS position positioning module, radar monitoring module and vehicle parameter reading module are connected to the input terminals of the calculation unit, and the output terminals of the calculation unit are respectively connected to the input terminals of the decision-making unit and the speed planning module, and t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More