

Magnetic attraction type cylindrical surface gas environment monitoring robot
A technology for environmental monitoring and robotics, applied in the field of robotics, can solve the problems of large robots and not suitable for cylinders with large curvature, and achieve the effect of scientific and reasonable distribution
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The specific implementation manners of the present invention will be described below in conjunction with the accompanying drawings.
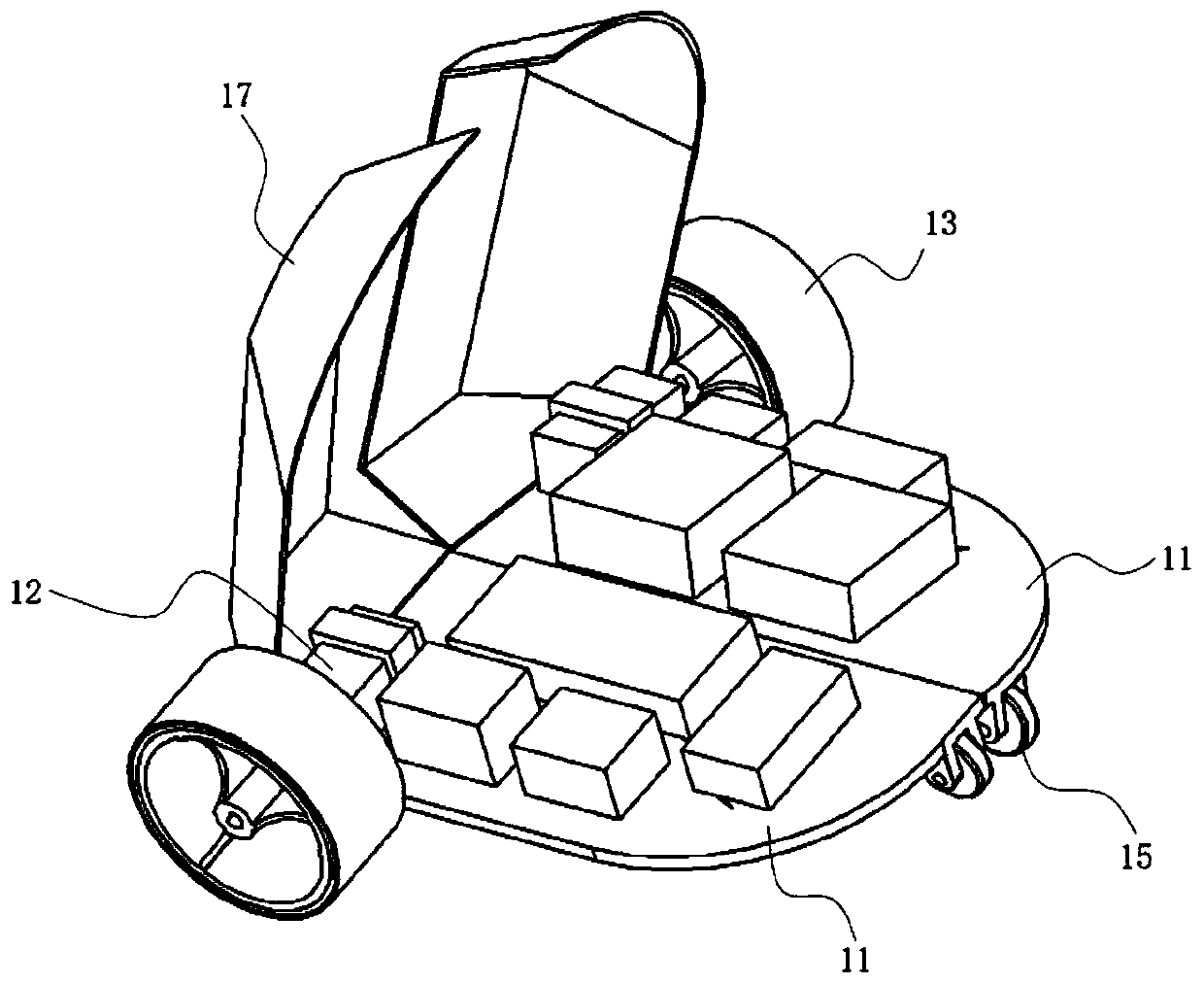
[0024] Such as Figure 1-4 As shown, the present invention provides a magnetic cylindrical gas environment monitoring robot, which includes two sets of symmetrically arranged wall climbing components, a battery 2, a voltage stabilizing module 3, a DC electric regulator 4, a remote control signal receiver 5, and a main control module 6 , temperature sensor 7, harmful gas sensor 8 and wireless data transmission module 9.
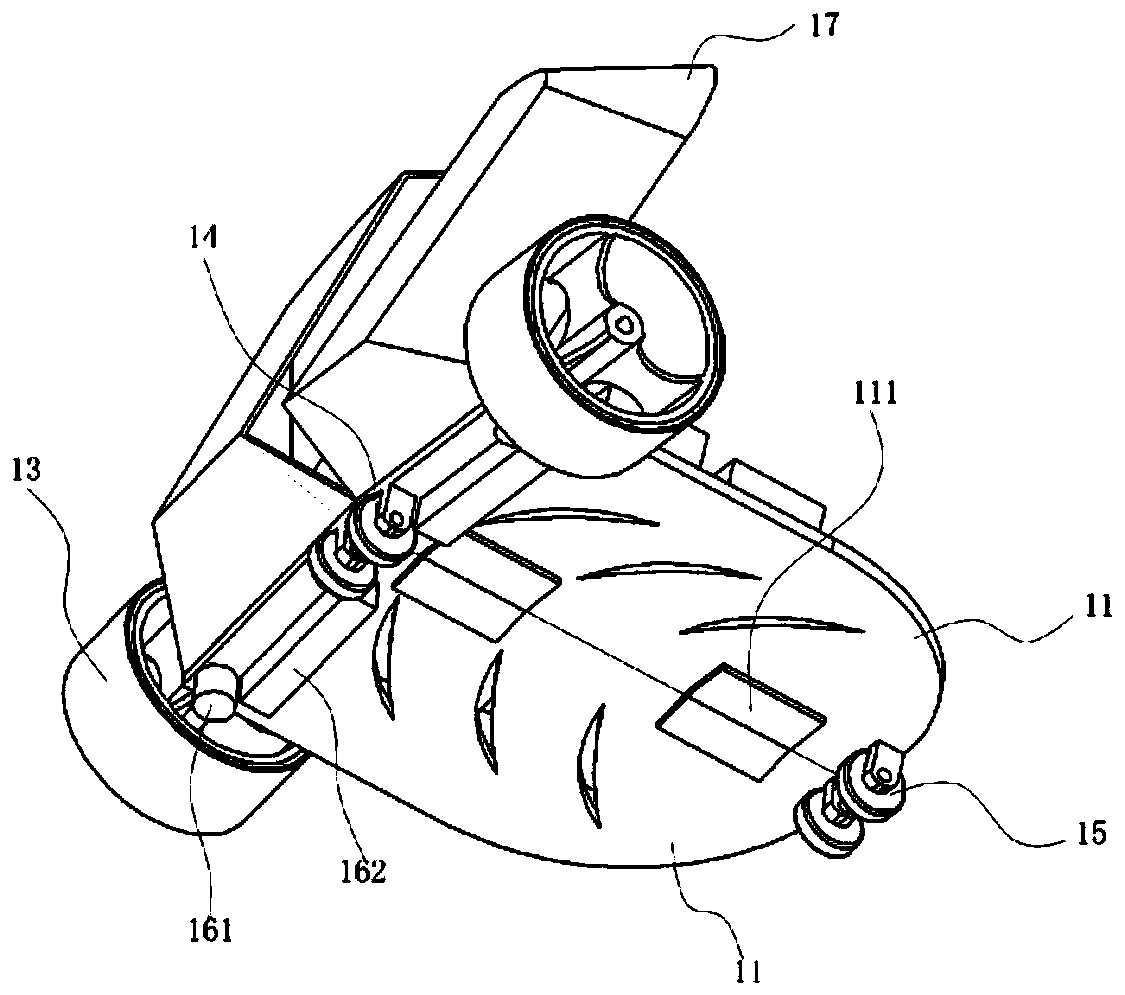
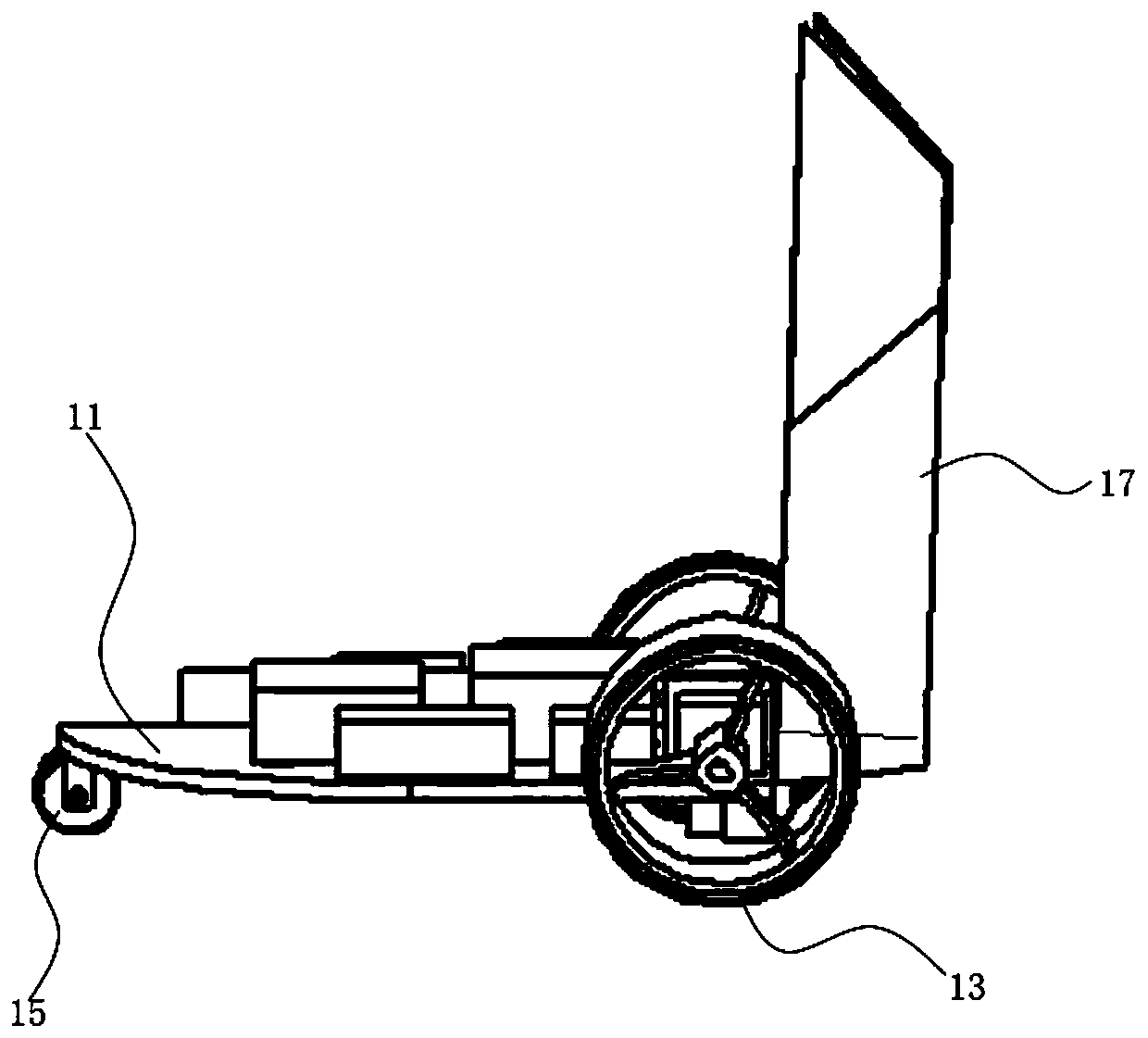
[0025] The wall climbing assembly includes a base plate 11 , a motor 12 , a driving wheel 13 , a front driven wheel 14 , a rear driven wheel 15 , a permanent magnet unit and a cover shell 17 .
[0026] The inboards of the base plates 11 of the two groups of climbing wall components are rotatably connected. Wherein, the bottom plates 11 of the two groups of climbing wall assemblies are connected by rotation through two h...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More